















 官方商城-正品备件
官方商城-正品备件
 DIOMIS
DIOMIS 西门子中国
西门子中国

 普通
普通

 本版热门话题
本版热门话题

 相关推荐
相关推荐 相关帖子推荐
相关帖子推荐
恭喜,你发布的帖子

发布于 2019-01-22 09:39:43
27楼
注意系统机电的开环精度必须要达到要求(确切点是带上反馈运算的手动闭环精度)。做过许多类似的项目(慢速的快速的):规定无超调的系统基本都是刚好到达变量的设定值时(偏差是零)变量的频率也刚刚好也是零就对了(模拟量反馈和给定精度要放大到要求精度的XX倍,要探底。(当然以单精度浮点数的极限精度为准(浮点数处理技巧:0.1mm=100某单位或者=48某单位或者=72某单位或者=XX某单位,选择哪个XX放大倍数取决于函数块的参数越界条件,至于某单位是什么管它呢你眼里只有数字无量纲)),这个时候必须有D,必须有D原因是数字精度放大了抖动大多了,甚至是KVFF(多数不要)。不要说系统中的每个特性都有死区、传感器和执行器根本没这么高的数字精度等等话,原因是你要从数字上和实践效果上做出来)。函数的其它管脚可以想办法控制,EN端不能撤了否则岂不是冷启动。当然你的0.1MM的要求可能不要准备这么多,一个减速加多次慢逼就行了,看你了。
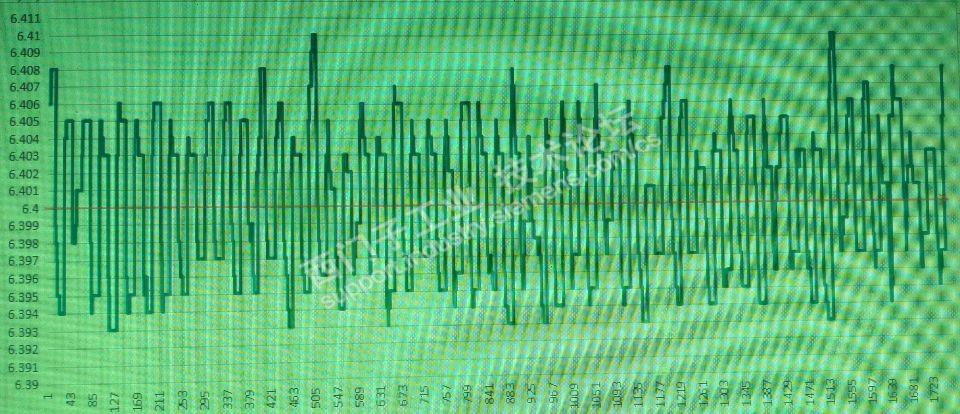
贴张去年做的精确液位控制(需要调节时5到7秒内要调节完毕,红线是设定值,有动态扰动源的情况下数据精度控制在±0.008,基本把能用的招都用上了,现场实践证明客户对工艺效果非常满意,横坐标单位是秒,这图片数据是第三方监控用不做控制用,控制用的是其中某个距离设定值很近的数据)。以前还做过压力,温度以及无超调的闭环位置控制等等,以上的基本思路都是和文字中描述的差不多。
再一个就是PID的调节,判断PID调节完成的条件是怎样?或者说是定位完成的信号如何触发?因为工艺流程的需要,定位完成走一下个流程。
我能想到的就是设定一个误差范围,如果PID调节在范围内切换手动?或者说不管他,直接在误差范围内就走下一步?
请填写推广理由:

分享
只看
楼主










