









 技术支持
技术支持 AI小西
AI小西
 风驰卡
风驰卡 产品入门
产品入门 在线产品选型
在线产品选型 售后登记和质保查询
售后登记和质保查询

 备件商城
备件商城 ASP工程师验证
ASP工程师验证 ASP公司证书验证
ASP公司证书验证 售后服务常见问题
售后服务常见问题 首页
首页 售前文档(样本、宣传册等)
售前文档(样本、宣传册等)  售后文档(FAQ、手册等)
售后文档(FAQ、手册等)
 首页
首页 立即开通1847会员
立即开通1847会员 标准机型应用中心
标准机型应用中心
 首页
首页 教室培训课
教室培训课 取证训练营
取证训练营 在线自学课
在线自学课 认证证书查询
认证证书查询 培训伙伴验证
培训伙伴验证 首页
首页 最新发帖
最新发帖 精华帖
精华帖 发新帖
发新帖 已解决问题
已解决问题 精华常见问题
精华常见问题 官方商城
官方商城 西门子中国
西门子中国

 普通
普通

 本版热门话题
本版热门话题

 相关推荐
相关推荐 相关帖子推荐
相关帖子推荐
恭喜,你发布的帖子

发布于 2019-02-20 14:54:07
22楼
我想了下 ,如果不用“线***”这种功能,好像也能做,就是基于世界坐标系的点到点关节移动
首先4轴码垛机器人 第四个轴只决定产品的方向 与产品搬运位置无关 1轴是水平旋转轴,2轴 和3轴 都属于关节类的轴,搬运机器人有两个大臂 2轴拖动大臂长度是L2 3轴拖动大臂长度是L3 ,首先 产品的XY坐标 是 2轴3轴角度导致的大臂在XY平面上的投影和1轴的旋转角度组成的,具体我草稿有点乱,Z坐标的值好像是sin(轴2角)*L2+sin(轴2角+轴3角-180)*L3 X坐标是cosX(cos(轴2角)*l2+cos(轴3+轴2-180)*l3) Y坐标是sin轴1(cos(轴2角)*l2+cos(轴3+轴2-180)*l3) ,然后我的数学水平就不知道怎么算反三角函数了. 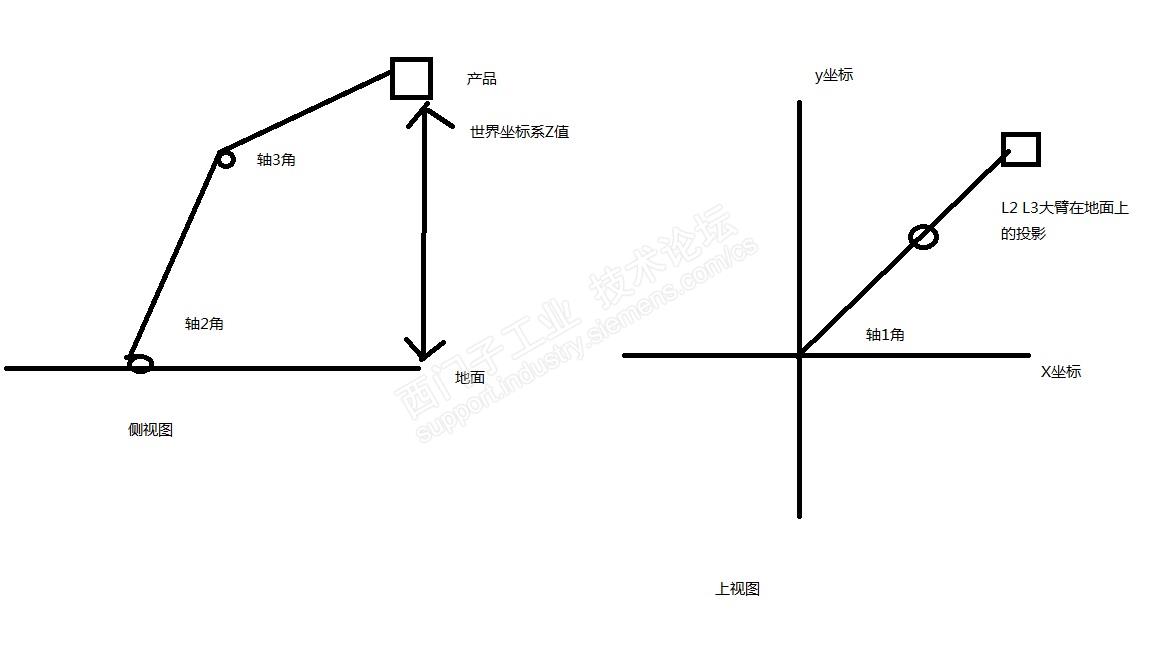
如果能计算反三角函数 已知坐标 求角度 。剩下的 就是 工艺上需求的坐标 和角度路径了。 不过这种路径 都是关节移动,而不是直线移动,直线移动好像还得微积分+支持伺服插补 我的小学文化就不够用了
请填写推广理由:

分享
只看
楼主










