















 官方商城-正品备件
官方商城-正品备件
 DIOMIS
DIOMIS 西门子中国
西门子中国

 黄金
黄金

 本版热门话题
本版热门话题

 相关推荐
相关推荐 相关帖子推荐
相关帖子推荐
恭喜,你发布的帖子

发布于 2019-03-13 09:56:28
5楼
振幅很小,几MM。
这个设备国外几年前就做出了,伺服电机的。
位移模式走正弦,电子凸轮很好做。
力模式走正弦,早期老外是先缓慢走一个波形,测工件的刚度KN/MM,即多少力需要多少位移。然后每个周期根据上个周期的波形修正调整一下。
后来改进
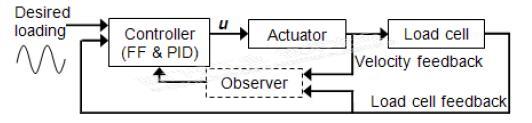
为了改善动态循环功能和反应, 实现自适应控制方法。虽然这种新的控制方法仍采用PID反馈,但它还包含“前反馈”(FF)和系统“观察器”,协助作动器适时调整目标速率,因此可以维护更加一致的载荷振幅,特别是当试件刚度迅速改变过程中。图显示了自适应控制方法组件的框图。
这种PID如何实现?
请填写推广理由:

分享
只看
楼主










