签到有奖
消息提醒
官方商城-正品备件
DIOMIS
点击复制链接
关注该帖后,有多人参加探讨会对您通知与提示!
帖子
精华
被关注
论坛等级:新手
注册时间:2019-06-10
普通 如何晋级?
2964
4
2019-06-10 10:47:45
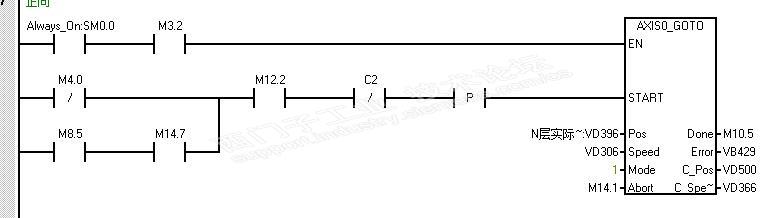
手头上一个项目需要用200SMART 做来回运动,一个循环需要6步做无限循环,每一个运动的距离是计算出来的,用的是相对位移 mode=1,现在需要随时暂停功能。现在我做的是 Abort 置1 暂停,启动时Abort 置0,然后再次START 输入一次。然后距离走的不对。比如 设定为1000mm ,运动到600mm时我暂停,再次启动后又走了1000mm 结果实际距离是1400mm。 有没有什么方法能暂停 启动后 还是走满1000mm的。难道要用绝对位置模式?还有暂停后发现 如图M12.2 一直闪烁刷新是为什么。。
剩余80%未阅读, 请登录阅读
请填写推广理由:
【机械制造/项目型工程】最新软硬件产品与解决方案请您查收!
助你技有所长,论有所获
首次发帖探讨工控技术话题 立获新人礼包,100中奖哦! (包含周边、书籍、兑奖西币)
共有9511条技术帖
恭喜,你发布的帖子
快扫描右侧二维码晒一晒吧!
再发帖或跟帖交流2条,就能晋升VIP啦!开启更多专属权限!
分享
只看 楼主
欢迎您访问支持中心!
丰富的视频,全方位的文档,大量的网友交流精华……
为了更好的完善这些内容,我们诚邀您在浏览结束后,花20秒左右的时间,完成一个用户在线调查!
感谢您的支持!
















 官方商城-正品备件
官方商城-正品备件
 DIOMIS
DIOMIS 西门子中国
西门子中国


 普通
普通


 本版热门话题
本版热门话题

 相关推荐
相关推荐 相关帖子推荐
相关帖子推荐












