














 官方商城-正品备件
官方商城-正品备件
 DIOMIS
DIOMIS 西门子中国
西门子中国

 普通
普通

 本版热门话题
本版热门话题

 相关推荐
相关推荐 相关帖子推荐
相关帖子推荐
恭喜,你发布的帖子

发布于 2019-06-20 08:57:10
8楼
矢量控制使用交流异步,伺服控制使用同步,没有这么绝对吧?
矢量控制不可以做位控系统吗?
还是感觉k版说的对,内环的控制系统必须能够实时的跟踪外环的跟定,当然这是实时,也是相对的,只是近最大能力去跟,如果内环有斜坡的话,就不能很快的达到外环的设定。
类似于我们做液压系统,液压阀的放大器都有斜坡,我们在调试的时候,都把放大器斜坡短接,
都是从PLC中进行斜坡控制,如果系统中两个斜坡都存在的话,控制系统实际上就不是外环要求的控制,有之后,对于位置控制系统涞水,滞后是不允许的,
不知道这样理解对不对?
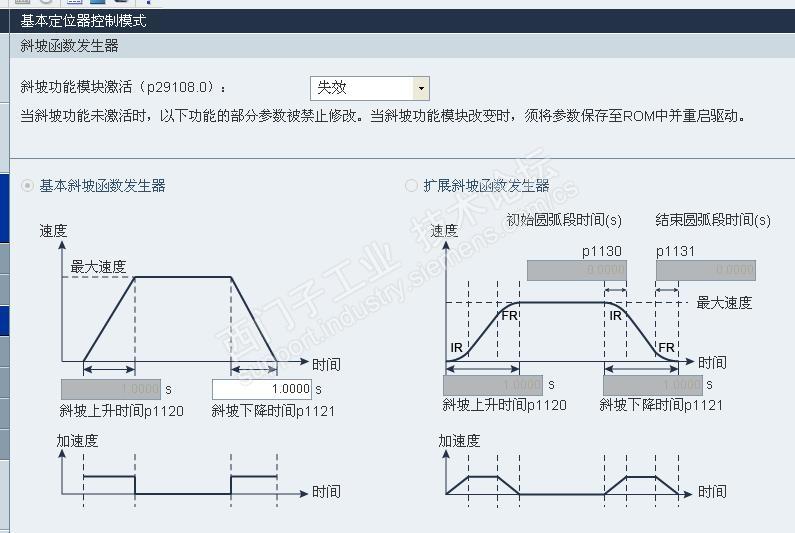
一个一个来吧,先说斜坡的事。下面是西门子V90伺服的位置模式和速度模式调试软件的斜坡设置画面。
斜坡时间设置为零不可想象。

请填写推广理由:

分享
只看
楼主










