















 官方商城-正品备件
官方商城-正品备件
 DIOMIS
DIOMIS 西门子中国
西门子中国

 白金
白金

 本版热门话题
本版热门话题

 相关推荐
相关推荐 相关帖子推荐
相关帖子推荐
恭喜,你发布的帖子

发布于 2019-06-20 11:44:52
12楼
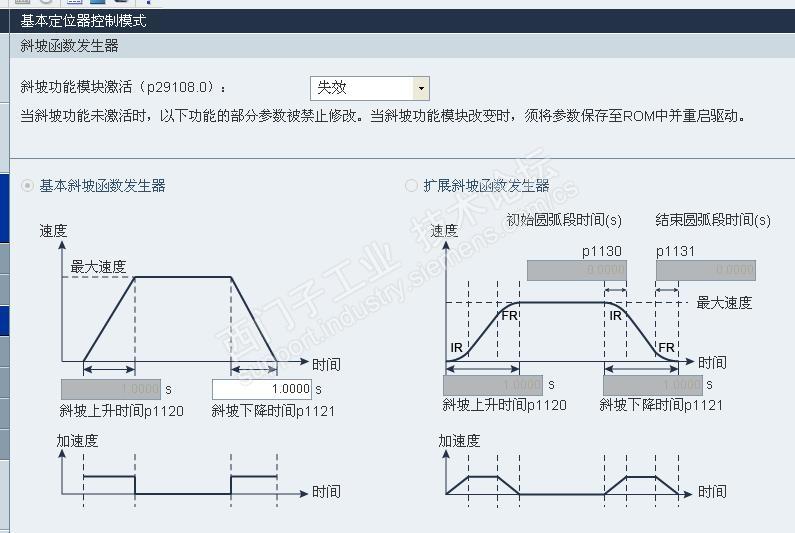
一个一个来吧,先说斜坡的事。下面是西门子V90伺服的位置模式和速度模式调试软件的斜坡设置画面。
斜坡时间设置为零不可想象。

关于V90的斜坡这个参数,和西门子技术支持沟通过这个事,西门子技术支持给的说法是建议失效。
并且默认情况下,西门子推荐的也是失效。
S120中好像就没有这个参数,只有在V90里才有这个斜坡这个参数。
斜坡函数发生器可在设定值突然改变时用来限制加速度从而防止驱动运行时发生过载。
位置环给出的设定值,只要加速度和减速度合适的话,不会发生设定值突变情况,即使参数不合理,发生突变情况,伺服电机超过最大的扭矩报警或者是跟随误差,伺服电机也会停机。所以没有必要加这个参数,我想这也是S120没有这个参数的原因
加了这个斜坡发生器以后,我感觉位置环的输出伺服电机就不会按照最大的能力去跟随,成了一个滞后系统,实时性肯定不行。
请填写推广理由:

分享
只看
楼主










