









 技术支持
技术支持 AI小西
AI小西
 风驰卡
风驰卡 产品入门
产品入门 在线产品选型
在线产品选型 售后登记和质保查询
售后登记和质保查询

 备件商城
备件商城 ASP工程师验证
ASP工程师验证 ASP公司证书验证
ASP公司证书验证 售后服务常见问题
售后服务常见问题 首页
首页 售前文档(样本、宣传册等)
售前文档(样本、宣传册等)  售后文档(FAQ、手册等)
售后文档(FAQ、手册等)
 首页
首页 立即开通1847会员
立即开通1847会员 标准机型应用中心
标准机型应用中心
 首页
首页 教室培训课
教室培训课 取证训练营
取证训练营 在线自学课
在线自学课 认证证书查询
认证证书查询 培训伙伴验证
培训伙伴验证 首页
首页 最新发帖
最新发帖 精华帖
精华帖 发新帖
发新帖 已解决问题
已解决问题 精华常见问题
精华常见问题 官方商城
官方商城 西门子中国
西门子中国

 钻石
钻石

 本版热门话题
本版热门话题

 相关推荐
相关推荐 相关帖子推荐
相关帖子推荐
恭喜,你发布的帖子

发布于 2019-08-22 10:52:37
12楼
针对楼主的问题,我来说下自己的看法。
第一,针对西门子的传动(矢量控制)变频器,不论是控制交流同步电机还是交流异步电机;不论是西门子电机还是第三方电机。变频器通吃。这是毋庸置疑的。因为西门子矢量控制变频器(比如说G系列),它的开放性结构和功能,都支持这些电机的传动控制;
第二,关于西家传动变频器的自动优化功能,没有对谁好,对谁不好的问题。西家自己的电机和第三方电机的优化辨识区别,就在于自家的电机不用设置参数,直接输入型号即可。第三方电机,需要输入正确的电机铭牌数据。仅此;
第三,关于优化辨识以后的控制效果,应该是一致的。没有区别。但是,作为使用者,应该熟知传动控制的基本原理,才能对优化结果掌控自如。
比如说,如下图示:
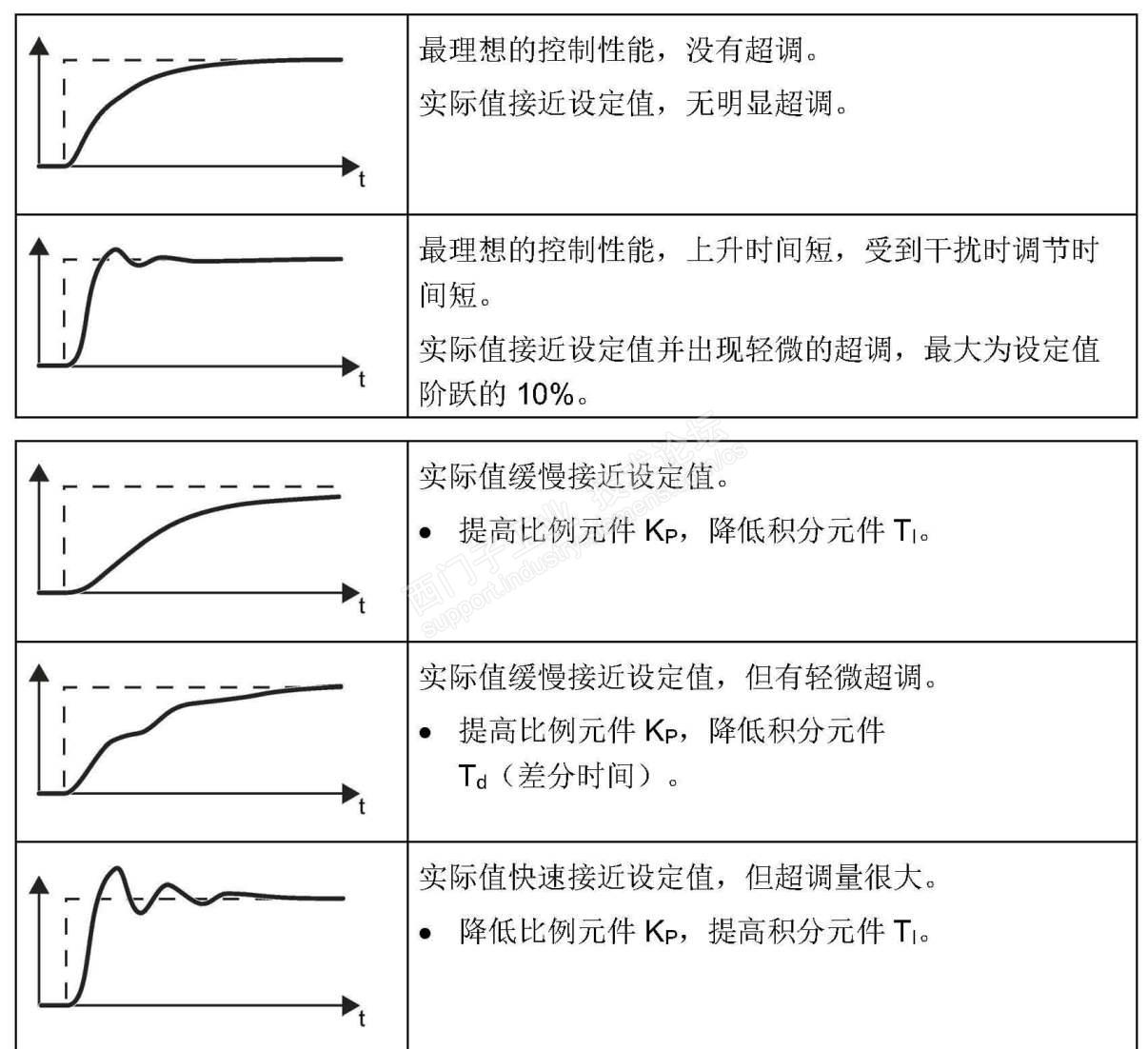
上述图表中的几种传动效果,那个正确呢?那个最好呢?你能说出来自己的认为吗?
让我说,这几种传动效果,都是正确的。合理的。为什么?因为作为闭环控制原理讲,他们的结果都是收敛的。实际值最终达到了设定值的目标。所以,都正确。
那么几种控制结果所不同的是什么呢?就是达到最终设定目标所使用的时间不同,中间过程的超调量和震荡次数不一样。而西家传动自动优化的结果,PI参数默认的是上图中的最后一种模式。通过快速的调节和震荡,最终收敛的效果。这种调节器参数计算的原理是传统的计算方法,叫对称法计算。这在教科书里都有讲,这里不再赘述。
那么我们实际使用,采用图示中的哪种更好?这就需要自己根据现场需求来确定了。是允许超调以最快的时间达到目标值,并允许震荡收敛?还是绝对不能超调,但调节时间可以不受限制,最终达到目标值。特定的调试结果,都是根据需求去决定的。没有好和不好之分,只有满足需要还是不满足需要之分。
因此,如果不是最后一个图形的结果,都需要现场再手动做工作的。通过修改PI参数,实现自己的需求。前提条件就是尊重自动优化的时间常数,调整PI参数。
如何尊重优化的时间常数?就是优化以后默认的PI时间常数,其乘积不变,修改PI参数各自的值。以满足不同的需求效果。
这里强调一点,就是如果能带着负载轴系做动态辨识最好。不能带负载轴系,只能电机空轴优化,那么若想获取理想的调试效果,一定要估算并手动设置负载轴惯量与电机轴惯量之比。否则达不到理想的调试效果。
请填写推广理由:

分享
只看
楼主










