


















 西门子商城
西门子商城 西门子中国
西门子中国

 普通
普通

 本版热门话题
本版热门话题

 相关推荐
相关推荐 相关帖子推荐
相关帖子推荐
恭喜,你发布的帖子

发布于 2019-08-31 10:31:52
10楼
确实显示有问题,放慢/减小速度可以看到行进过程中已经经过的轨迹在后续中会变形偏离,例如确实经过过了点(1,1),但之后 曲线逐渐变形偏离了。
引用8楼详细内容:
不知道那里问题,之前拟合应该是错误的,我在SINTRUN上测试了下
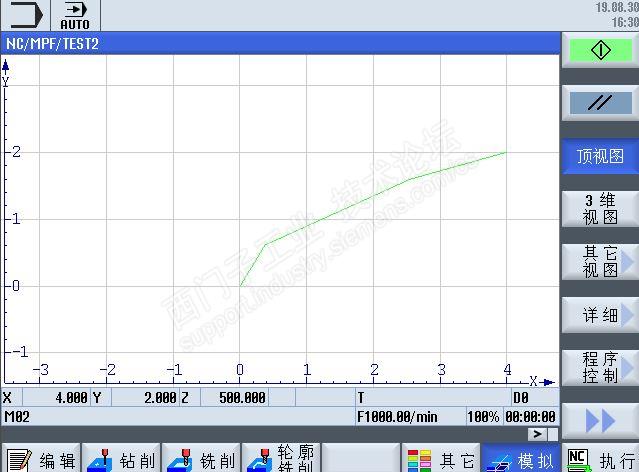
这个图形完全不像手册上那个一点也不圆滑,不应该是放大失真?
我又编了一个循环逐点生成y=sqrt(x)的程序,图上看起还是比较圆滑,但两者不重合

NC程序如下:
DEF REAL rIC1
G90 G00
N9 G00 X0 Y0
F1000
N10 POLY PO[Y]=(2) PO[X]=(4,0.25) PL=4
;GOTO END1
G00 X0 Z0
rIC1=0
WHILE rIC1<4
G90 G01 X= 0.25*rIC1*rIC1 Y=rIC1/2
rIC1= rIC1+0.01
ENDWHILE
END1:
M02
的确,在自动方式下实时记录,会看到曲线不断的偏移,之前我是直接用模拟得到的最终曲线。
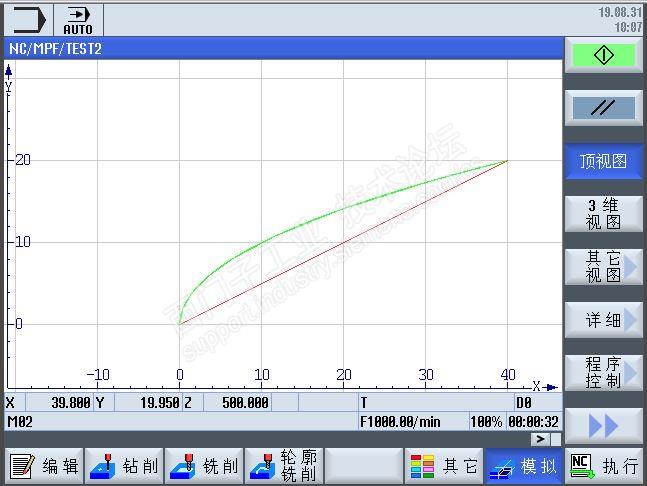
我把程序改进了下,都同时放大10倍,并且起点各和终点都用变量,这样逐点生成的与多项式看上去差不多了。
这是 POLY PO[Y]=(20) PO[X]=(40,2.5) PL=4的曲线

逐点生成与多项式的,基本重合,放大了有偏离

改了起点位置X10,Y10

NC程序
DEF REAL rIC1
DEF REAL rStarPOSX=0, rStarPOSY=0
DEF REAL rEndPOSX=40,rEndPOSY=20
G90 G00
N9 G00 X=rStarPOSX Y=rStarPOSY
F100
N10 POLY PO[Y]=(rEndPOSY) PO[X]=(rEndPOSX,2.5) PL=4
;GOTO END1
G00 X=rStarPOSX Y=rStarPOSY
f1000
rIC1=0
WHILE rIC1<4
G90 G01 X=rStarPOSX+(rEndPOSX-rStarPOSX-2.5*16)/4*rIC1+2.5*rIC1*rIC1 Y=rStarPOSY+(rEndPOSY-rStarPOSY)/4*rIC1
rIC1= rIC1+0.01
ENDWHILE
END1:
M02
看来就是x(p)与y(p)的拟合,起点,终点,多项式的a0,a1....a5需在方程中。逐点生成只能模拟下,实际应用有些问题算法,加速度,机械特性。。。
请填写推广理由:

分享
只看
楼主










