









 技术支持
技术支持 AI小西
AI小西
 风驰卡
风驰卡 产品入门
产品入门 在线产品选型
在线产品选型 售后登记和质保查询
售后登记和质保查询

 备件商城
备件商城 ASP工程师验证
ASP工程师验证 ASP公司证书验证
ASP公司证书验证 售后服务常见问题
售后服务常见问题 首页
首页 售前文档(样本、宣传册等)
售前文档(样本、宣传册等)  售后文档(FAQ、手册等)
售后文档(FAQ、手册等)
 首页
首页 立即开通1847会员
立即开通1847会员 标准机型应用中心
标准机型应用中心
 首页
首页 教室培训课
教室培训课 取证训练营
取证训练营 在线自学课
在线自学课 认证证书查询
认证证书查询 培训伙伴验证
培训伙伴验证 首页
首页 最新发帖
最新发帖 精华帖
精华帖 发新帖
发新帖 已解决问题
已解决问题 精华常见问题
精华常见问题 官方商城
官方商城 西门子中国
西门子中国

 普通
普通

 本版热门话题
本版热门话题

 相关推荐
相关推荐 相关帖子推荐
相关帖子推荐
恭喜,你发布的帖子

发布于 2019-11-02 10:03:16
15楼
原始关于震荡的疑问现在看来是数据调用混乱造成的,例如同一个模拟变量同时被OB1和OB35读取,没再深入分析; 目前我用PID做出的效果缺陷是两点:跟随滞后、预测精度差;
这个是完美的跟随和预测,精度高:黄色速度蓝色偏角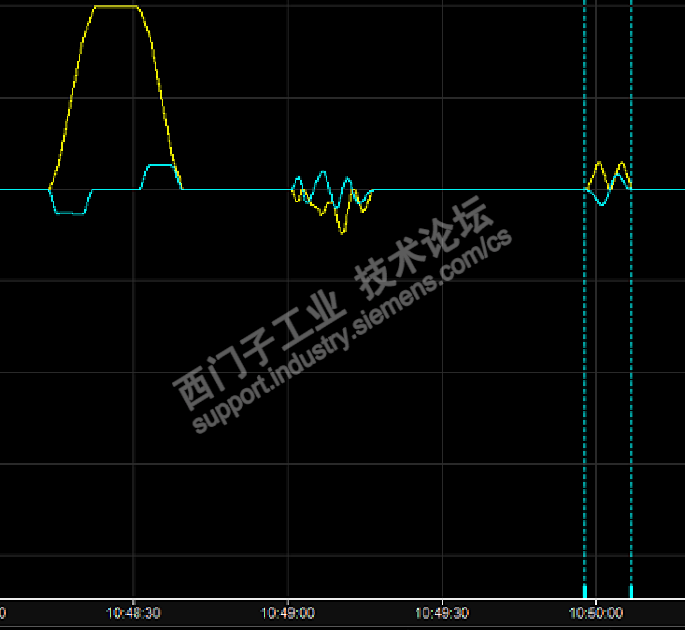
这个是pid效果,跟随滞后,预测精度不可靠:蓝色速度红色偏角
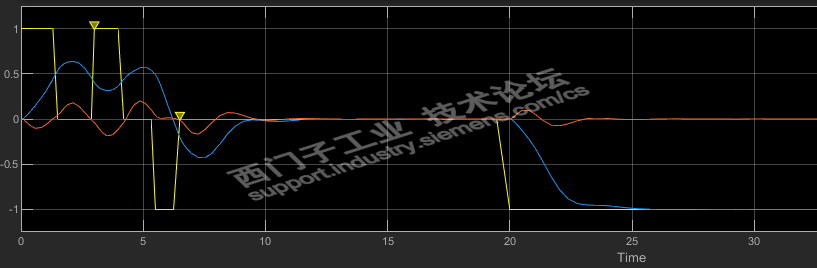
至此我想这两个波形其实差异在于基础理论有本质的区别,是否可以得出结论就是PID控制无法实现1图
的控制效果;那么1图源于那个理论或算法呢?
如果继续沿着pid这条路,仅剩一条路可以尝试就是参数最优化,有人通过粒子群优化算法去做;
如果全局推翻pid这条路,就要考虑楼上仁兄点拨的极点配置思路;
但是哪条路能实现快速跟随和精确预测呢?
请填写推广理由:

分享
只看
楼主










