


















 西门子商城
西门子商城 西门子中国
西门子中国

 钻石
钻石


 本版热门话题
本版热门话题

 相关推荐
相关推荐 相关帖子推荐
相关帖子推荐
恭喜,你发布的帖子

发布于 2019-12-28 21:26:15
30楼
那再问个不专业的问题,如果就目前的参数,其他我都不改,单纯调整P342参数,对速度控制有效果吗?
因为我感觉速度控制器应该是通过p342,进行核算出速度环的其他相关控制参数吧?
就如同我上上面的截图,负载转动惯量每改变一些,下一步流程就会带来其他参数的变更。
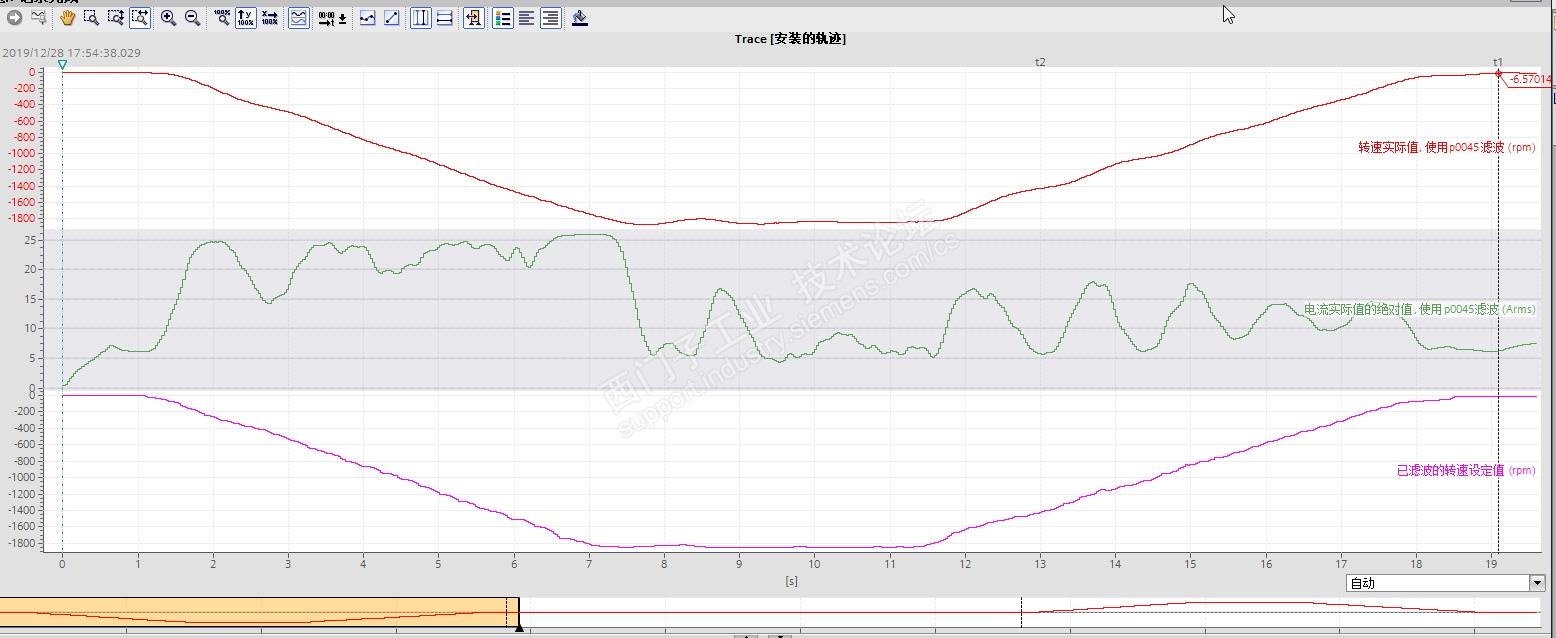
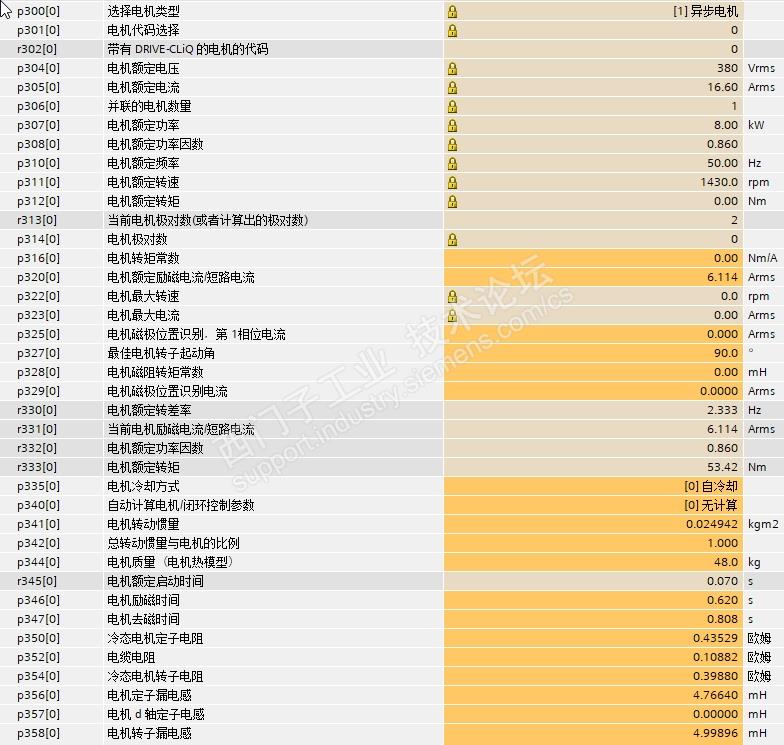
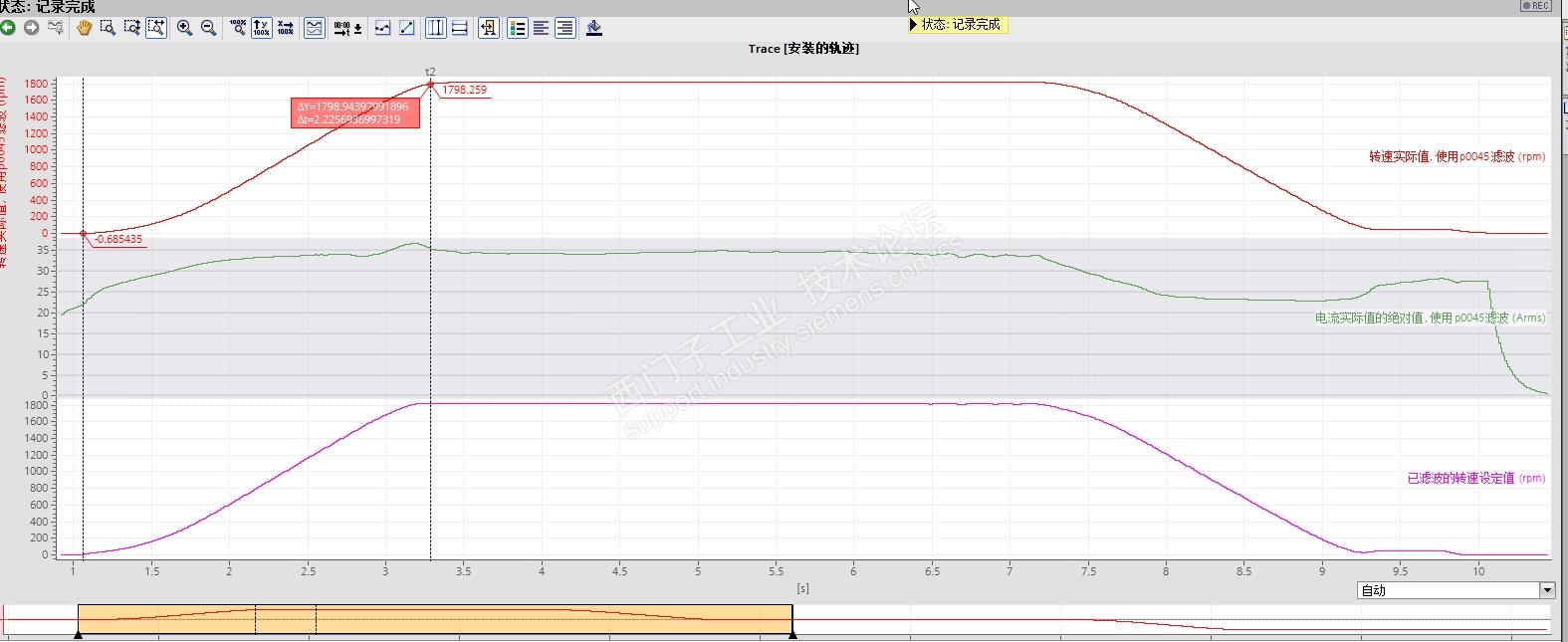
上面2个trace的截图,是2台不同的电机的运行曲线。参数截图是上面那个电机的。
引用24楼详细内容:
今天又有幸有空和两位专家交流,我一直是想整明白这个转动惯量的问题的。
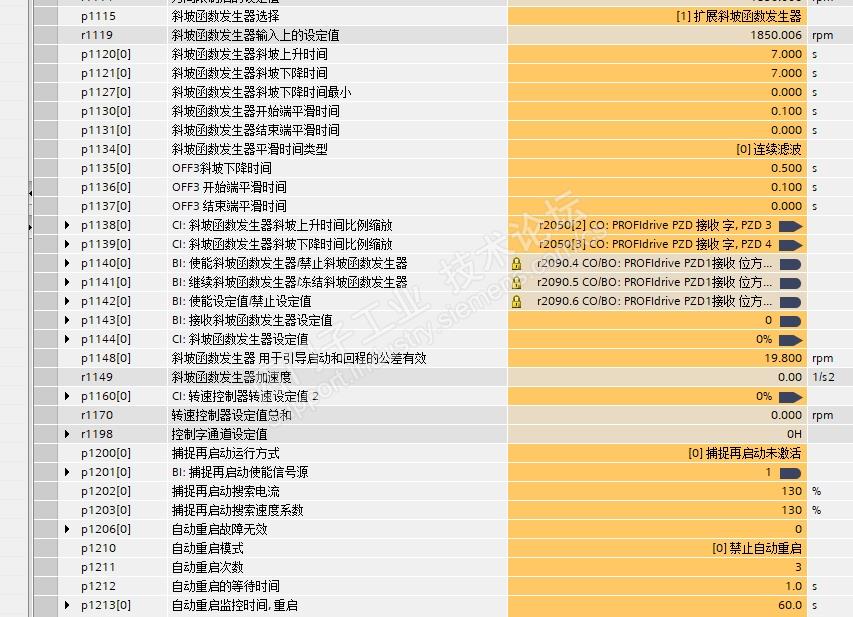
我的设定值的确是不断变化的,因为plc做了位置环的程序,加了个简单的pld调整,设定值几乎是没10ms都在更新一次的;
通过PROFINET通讯给定设定转速给变频器
发几个截图:

引用20楼详细内容:
P342总转动惯量与电机的比例,我觉得,这个不是应该是根据实际情况来写入的吗?我现在全部是1,
我觉得是因为我上面所说的,我这边给不出准确的比例值,索性就没有填,因此一直是默认值1.
像sew的驱动器,它有一个转速控制器优化向导,其方式就是让调试人员手动输入负载转动惯量,然后点击下一步,软件会生成一组转速控制器的优化参数,供调试人员参考,当然也可以手动调整。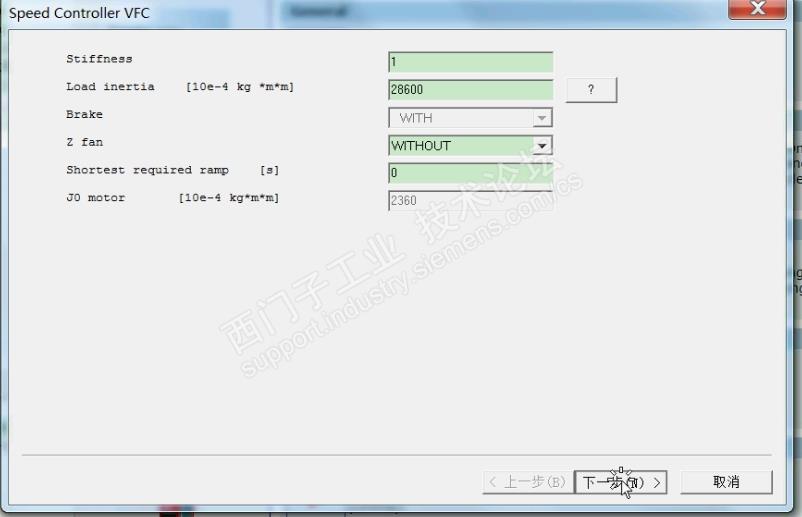

引用17楼详细内容:
如我上面所说,我目前调试的设备,如果是g120驱动的三相异步电机,目前基本都不做动态识别的,因为设备行程有限,如果做,也是完全脱开负载电机带减速机空转,因个人经验能原因,之前如此做过几次,最终发觉效果不理想,因此后面都不再做了,只做完静态识别,然后重新调校速度调节器的PI值,如此说,可能驱动器内部设计的思路估计就是静态识别后pi参数恢复默认,如果带负载做动态识别,可能会自动有所调整,而我一般又不做,最终导致如此情形。我调试的驱动p342都是1.
哦。动态优化:测试时,不是转一下,转一下的么?
其实,这是都是异步电机矢量模式,(前面一定做过电机静态辨识,电参数已经知道了。)动态辨识(转动惯量)优化(速度环),是给出几个不同的转矩和上升斜率,假如没有转动惯量,则测量的电机转速=输出频率。如果存在转动惯量,则获得的实际电机转速滞后与输出频率,转动惯量越大,滞后越多。同时STO减速,转动惯量越大,时间越长,由此也可得出滑动摩擦系数。将其从升速过程中扣除,这就得出了电机(以及轴系)的转动惯量。
如果成功辨识优化通过,那么就将最快响应的值写入前馈预控功能项。这就是动态优化。
当然,非西门子电机的转动惯量与同等西门子电机的转动惯量是不同的。电机轴空载动态辨识后,342也不是1。我一般把此数值乘341原值,填入341中。这时341就是这台电机的转动惯量。
这里要说明一点:轴系(包括电机转子)转动惯量越大,稳速态,抗负载变动干扰越好。抗冲击负载能力越强。但变速越困难。所以要用前馈预控来改善。
而快速定位,则轴系的转动惯量越小越好,所有转矩输出都让它作用在工件惯量(质量)上。这都是机电一体化设计的基本要求。
对于反馈闭环部分的参数影响,只是测试过程之后计算写入一次。
上面的那个变速、稳速过程电流都不稳。增益过大了吧?
请填写推广理由:

分享
只看
楼主










