


















 西门子商城
西门子商城 西门子中国
西门子中国

 黄金
黄金

 本版热门话题
本版热门话题

 相关推荐
相关推荐 相关帖子推荐
相关帖子推荐
恭喜,你发布的帖子


发布于 2020-05-14 22:14:20
1楼
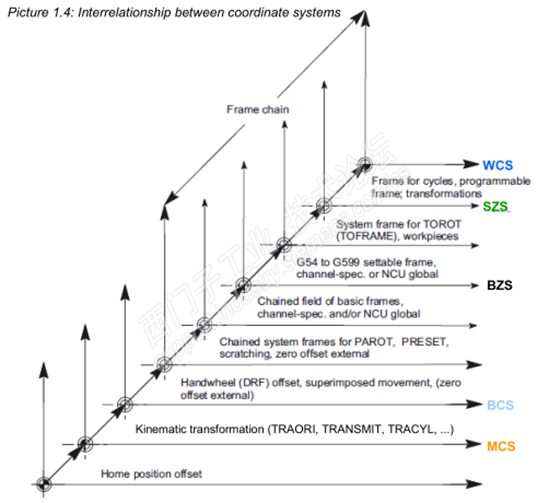
TRANS位移的产生主要取决于坐标系的变换,这里简单说明一下,展开的话,篇幅太大。大体上来说,是从MCS,BCS,BZS,SZS,到WCS的逐一变换。
MCS机床坐标系->BCS基准坐标系,这里的位移主要来自于运动学变换,TRAORI,TRAANG,TRANSMIT,TRANCYL等属于这一类变换,相关参数太多,举例说明:MD24100。
在MCS(机床坐标系)中读出实际值用$AA_IM[轴]表示。
BCS基准坐标系->BZS基准零点坐标系,这里的位移来自于多个因素。以下列举了一些:
External zero offsets (外部零点偏移)($AA_ETRANS[<Axis>])
Handwheel (DRF) offset(手轮偏置) ($AC_DRF[<Axis>])
Superimposed motion(叠加运动) ($AA_OFF[<Axis>])
Chained system frames (e.g. $P_PARTFR Rotary table reference) Chained basic frames ($P_NCBFR[n], $P_CHBFR[n])
Rotary table reference: $P_PARTFRAME (TCARR and PAROT)
在BKS(基准坐标系)中读出实际值用$AA_IB[轴]表示。
$P_BFRAME 用 $P_UBFR 说明。
BZS基准零点坐标系->SZS可编程零点坐标系,这里的位移来自于G54-G599的偏置,以及系统框架TOROT,TOFRAME。
Tool reference $P_TOOLFRAME (TOROT, TOFRAME)
在BNS(基准零点坐标系)中读出实际值用$AA_IBN[轴]表示。
$P_IFRAME用$P_UIFR说明。
SZS可编程零点坐标系->WCS工件坐标系,这里的位移主要来自于循环,框架,以及编程部分的偏移。
Workpiece reference $P_WPFRAME(Used for CYCLE800)
Programmed WO $P_PFRAME (TRANS, ROT, SCALE, MIRROR)
Cycle reference $P_CYCFRAME (TRANS, ROT, SCALE, MIRROR)
在ENS(可设定的零点坐标系)中读出实际值用$AA_IEN[轴]表示。
在WKS(工件坐标系)中读出实际值用$AA_IW[轴]表示。
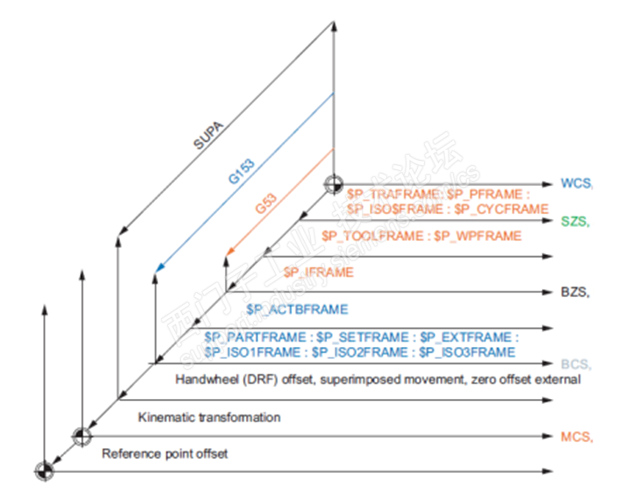
各个坐标系的取消如下图。
请填写推广理由:

分享
只看
楼主










