V90回零,实际位置距离原点限位开关位置较远,挡板碰到原点开关后平台开始反向运行,脱离原点后还会继续运行一段距离后停车(约10mm),因为采用EPOS控制方式,所以用V-ASSISTANT将原点偏移设置为0,仍存在该问题!
因此我查询了一下V90的回原点轨迹,对于EPOS控制下的回原点方法,并没有找到明确的说法(希望懂的大师能够指点一二),但是对于工艺对象控制方式,我倒是在博图中看到了回零轨迹如下图:
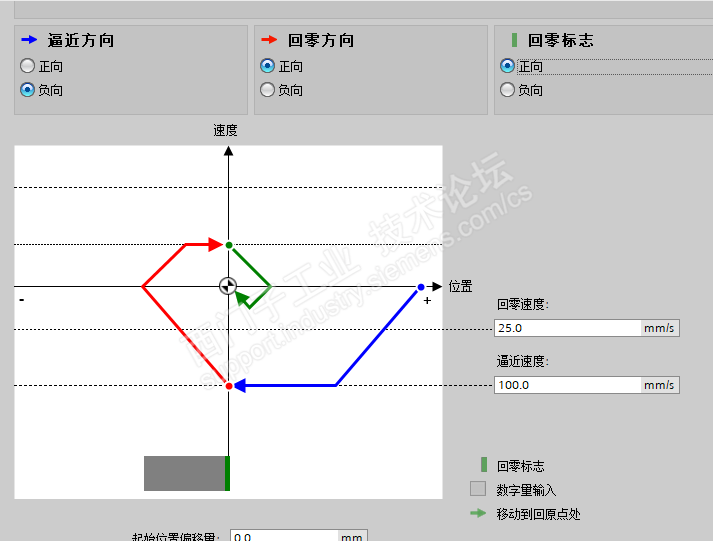
根据个人理解,蓝色线段表示按照设定方向运行搜索原点限位。红色线段表示碰到原点限位后,减速至0后反向运行至脱离原点限位,最后绿色线段表示做绝对位移为0的往复运动(P.S 为什么做该动作,一直没搞清)
根据该曲线,我首先想到的是,是否是编写存在BUG,导致在轴未完成最后一段往复运动就被切换至其他模式?
程序如下:
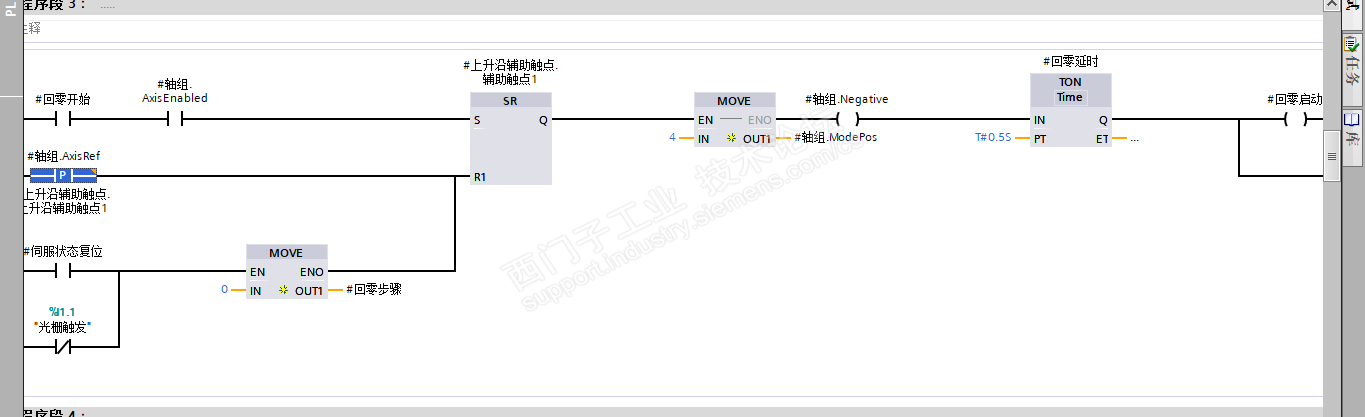
#回零启动最后会导通Execute Mode(激活新mode),那么就是会在axis. Reference触发后复位Execute Mode,因此是否是axis. Reference 信号触发过早,导致轴未完成往复运动就被断开了Execute Mode?
为了验证我得想法,我首先在axis. Reference后添加了一个常开点,这样SR就不会被复位,Execute Mode也会一直导通。测试的时候为了安全起见,我将回零速度调到最慢,同时守住急停按钮和断路器(哈哈哈,设备很贵,我超怂的)。结果并没有任何改变,后来查询手册发现Execute Mode只是激活新mode(上升沿有效),并不会影响之后轴的运行状态。
为此,我用trace监控了回零过程中的几个我认为关键的几个变量:actual position、actual mode、axis reference、伺服原点(外部原点开关信号)、Execute Mode、AxisPosOK。各信号状态和时间的关系如下图!

MODE=7时是点动模式,为了防止多轴干涉,我将所有轴正向点动至正极限后开始回零。咱们从mode由7变4处开始分析,当mode变为4后,position变为0,axisreference变为0,轴开始反向搜索零点,当轴碰到原点限位后(即伺服原点变为1),轴开始减速至0并反向运动(啊啊啊,保存到时候没注意,position曲线少了一点,这里看不到了,实在抱歉,而且应该加一个velocity曲线的,这样能看到方向!),此时,当伺服反向运行至脱离原点限位位置后,axisreference信号为1,position数值瞬间为0,此时回零完成。
到此,可以发现轴并没有做所谓的绝对距离为0的往复运动,那我就不明白喽,为什么我的实际位置和零点限位会产生10mm左右的偏差呢?
是因为通讯延迟导致轴停止过晚?是减速时间过长?
等我有新的进展再和大家分享,同时也希望各位高手能为小弟指点迷津!










 技术支持
技术支持 AI小西
AI小西
 风驰卡
风驰卡 产品入门
产品入门 在线产品选型
在线产品选型 售后登记和质保查询
售后登记和质保查询

 备件商城
备件商城 ASP工程师验证
ASP工程师验证 ASP公司证书验证
ASP公司证书验证 售后服务常见问题
售后服务常见问题 首页
首页 售前文档(样本、宣传册等)
售前文档(样本、宣传册等)  售后文档(FAQ、手册等)
售后文档(FAQ、手册等)
 首页
首页 立即开通1847会员
立即开通1847会员 标准机型应用中心
标准机型应用中心
 首页
首页 教室培训课
教室培训课 取证训练营
取证训练营 在线自学课
在线自学课 认证证书查询
认证证书查询 培训伙伴验证
培训伙伴验证 首页
首页 最新发帖
最新发帖 精华帖
精华帖 发新帖
发新帖 已解决问题
已解决问题 精华常见问题
精华常见问题 官方商城
官方商城 西门子中国
西门子中国


 普通
普通


 本版热门话题
本版热门话题

 相关推荐
相关推荐 相关帖子推荐
相关帖子推荐











