









 技术支持
技术支持 AI小西
AI小西
 风驰卡
风驰卡 产品入门
产品入门 在线产品选型
在线产品选型 售后登记和质保查询
售后登记和质保查询

 备件商城
备件商城 ASP工程师验证
ASP工程师验证 ASP公司证书验证
ASP公司证书验证 售后服务常见问题
售后服务常见问题 首页
首页 售前文档(样本、宣传册等)
售前文档(样本、宣传册等)  售后文档(FAQ、手册等)
售后文档(FAQ、手册等)
 首页
首页 立即开通1847会员
立即开通1847会员 标准机型应用中心
标准机型应用中心
 首页
首页 教室培训课
教室培训课 取证训练营
取证训练营 在线自学课
在线自学课 认证证书查询
认证证书查询 培训伙伴验证
培训伙伴验证 首页
首页 最新发帖
最新发帖 精华帖
精华帖 发新帖
发新帖 已解决问题
已解决问题 精华常见问题
精华常见问题 官方商城
官方商城 西门子中国
西门子中国

 普通
普通

 本版热门话题
本版热门话题

 相关推荐
相关推荐 相关帖子推荐
相关帖子推荐
恭喜,你发布的帖子


发布于 2020-08-17 14:34:57
3楼
谢谢你的解答,有些信息在帖子里没有表述完整;
针对您的解答,我逐条回复下
参数方面:
1、后面有设备改造机会计划是要改成带编码的矢量控制,在提升场景使用V/F模式是个安全隐患;
而且我在接手这个工作的时候,发现PLC程序对提升距离用了简单的计时来实现,针对“冒顶”也只是使用了阻挡限位开关。
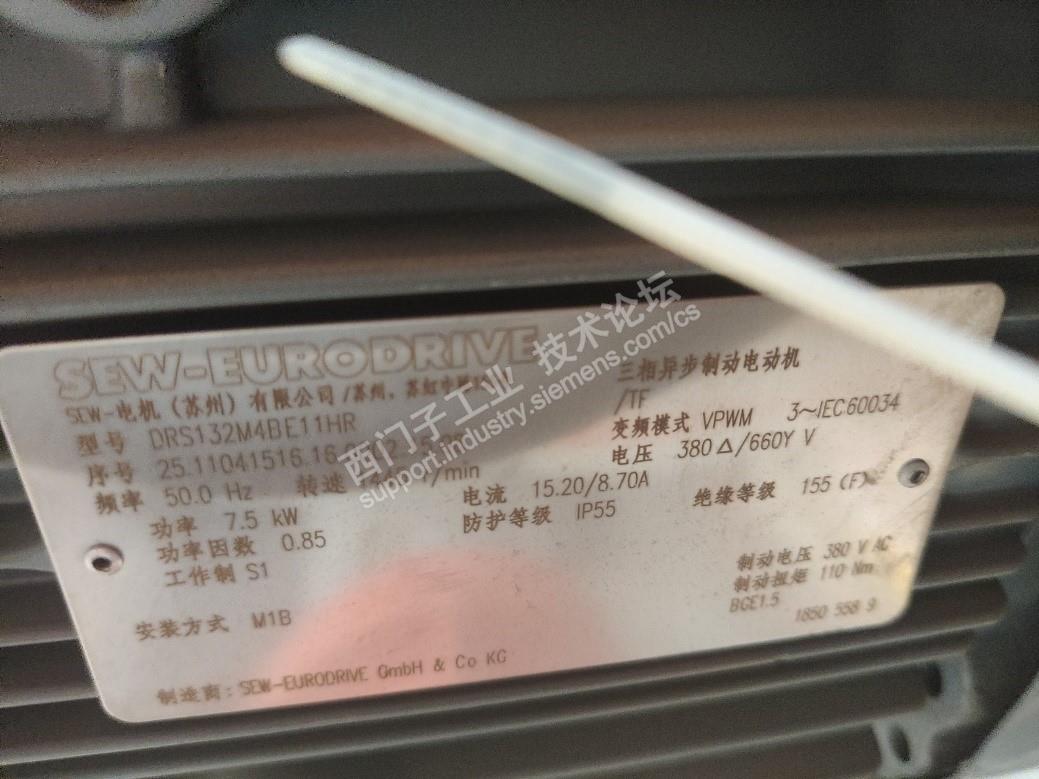
2、电机参数中电机数量与实际有误,现在是将两台电机当作一台2倍功率的电机来使用了,这种设置方式会造成什么影响;
3、P219参数我在TIA中上传的参数中也没看到,下午我去现场查下;
硬件部分:
1、故障记录中的信息,一直未重视,这里我会重点关注下;
2、故障记录中的信息,一直未重视,这里我会重点关注下;
3、目前抱闸控制P732参数为:r52.12 CO/BO: 状态字 1: 电机抱闸打开,应该就是您说的DO2;
4、变频器的抱闸接触器使用的是施耐德的RXM2AB2P7,交流接触器,在变频器控制模块的24端子(NO)接入火线,25端子(Com)接入接触器的线圈,
图纸中未标注使用浪涌抑制器,这个我会去现场再确认下,不能浪涌抑制器会造成什么后果;
5、串联PLC这点,我猜测是供应商当初在设计时,考虑使用V/F方式有安全和性能的不足问题,
在PLC中对抱闸释放加了延时,保证电机扭矩的建立,这个做法是不大合理,后期改造考虑此处要修改;
电机参数如下图:
事故时变频器状态信息都没有第一时间拿到手,也导致了后续查问题比较棘手,而且操作人员描述的事故情况也是跟实际有出入;
“下一个工位”是吊具将负载提升到位后,吊具开始前进到下一个工位,前进控制是使用了另外一套变频器;
针对皮带打滑的问题是有可能,我们现场的吊具是通过317F控制滑触线,滑触线再控制吊具本体的PLC;
在上述工位发生的溜车事故,总共是发生了两次,一次就是上面描述的,另外一次是在操作人员没有任何操作的情况下,吊具自己缓慢下落(排除程序问题)
在第二次事故时,我们将问题的重点转移到“滑触线”上,分析了控制电路,如果滑触线碳粉污染是有发生的“第二次事故”的可能性;
两次事故都发生在同一段滑触线上,而且是不同的吊具,怀疑是滑触线的问题,所以我们当时第一时间将此处的滑触线进行了更换
 精华帖版主置评:认真描述问题,态度值得赞。kdrjl
精华帖版主置评:认真描述问题,态度值得赞。kdrjl
请填写推广理由:

分享
只看
楼主










