
整个程序看下来,对于statPosTimes这个变量也就是PosTimes不怎么懂,主要就是不清楚这个变量在程序中起到什么作用,也就是它实际在轴定位中是显示什么值的。
老师还有一个问题,state表示FB的状态,status 也表示FB的状态,那么他们有什么区别吗。。

老师这里..都是备注是不是搞错了......看着像程序。。
老师对于绝对值定位的程序我看不太明白,可能还是对变量 #statPosTimes #posTimes #posOffset #resetPos不理解。
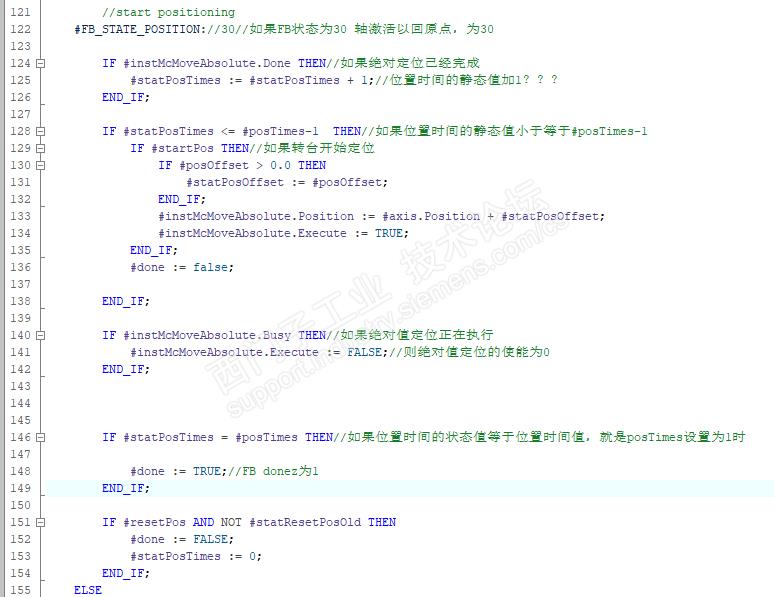
122: 表示如果轴的使能已激活并且在Home位的话执行下面的程序
124: 如果绝对定位已经完成
125: 也就是 #statPosTimes的值赋予1
128: 就是为了看 #posTimes的值是不是大于1. ( #posTimes这个变量是干嘛用的。设定MC_MoveAbsolute指令的Position值吗??)
129: 如果启动定位的使能为1
130: 如果#posOffset大于0.0 (#posOffset这个值是干嘛用的??)
131: 把#posOffset值存到#statPosOffset 里面
133:就有点不懂了,不明白这样写什么意思
134:就是启动绝对值定位
(老师上面的这些可以具体讲一个例子吗,带入实际值的)

这里的151 和 170 可以构成上升沿吗? 因为151 的程序在CASE里面,170的程序不在CASE里面。
还有一个就是resetPos是表示复位定位吗?但是这里只执行清除#statPosTimes的值。

221:就是表示发生故障的时候将#stateFBState的值存到#state里面好显示FB块的状态,但是226的程序又是什么意思啊。既然已经将故障时候的状态复制给#state显示FB块的状态了,为什么又把0赋值给#stateFBState了?



















 西门子商城
西门子商城 西门子中国
西门子中国


 普通
普通


 本版热门话题
本版热门话题

 相关推荐
相关推荐 相关帖子推荐
相关帖子推荐












