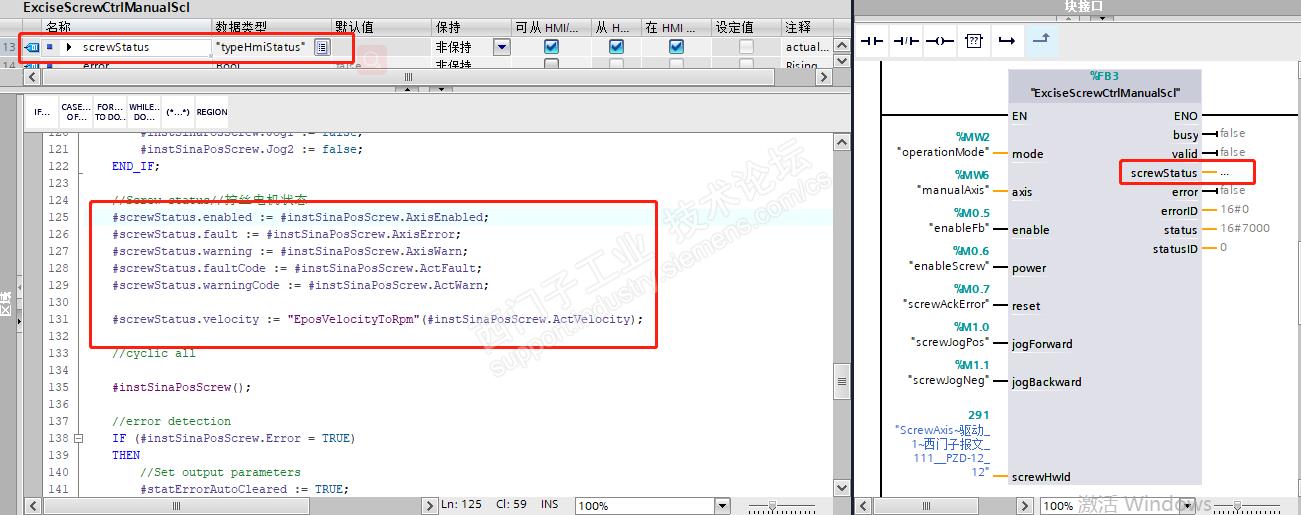
老师,screwStatus 他的数据类型是自己定义的数据类型,然后将SINA_POS(FB284)的使能,驱动故障,驱动报警等等都赋值到screwStatus 里面对应的点上。然后在OB中调用这个FB的时候,screwStatus 拐角是怎么显示的?比如现在#screwStatus.enabled := #instSinaPosScrew.AxisEnabled;为1,那在screwStatus 拐角上应该显示啥? 要是#screwStatus.warningCode := #instSinaPosScrew.ActWarn;为1,那screwStatus 拐角上又应该显示啥?因为没有实际设备,所以不知道这个状态显示是什么样子的。。
老师,131的程序。"EposVelocityToRpm"是一个FC块,括号中的#instSinaPosScrew.ActVelocity是不是就给"EposVelocityToRpm" 这个FC块中的Input中的eposVelocity赋值?
135的程序不懂是什么意思。

老师,这个程序当模式为0,轴为0表示垂直机械臂的时候执行JMPN 跳转到 exit 然后执行的是(RET)指令,不就退出FB块并将RLO为0了吗?

老师,程序通过#hwLimitOn激活硬限位,我不明白#hwLimitOn是什么,我在程序中没有找到可以触发#hwLimitOn闭合的条件。
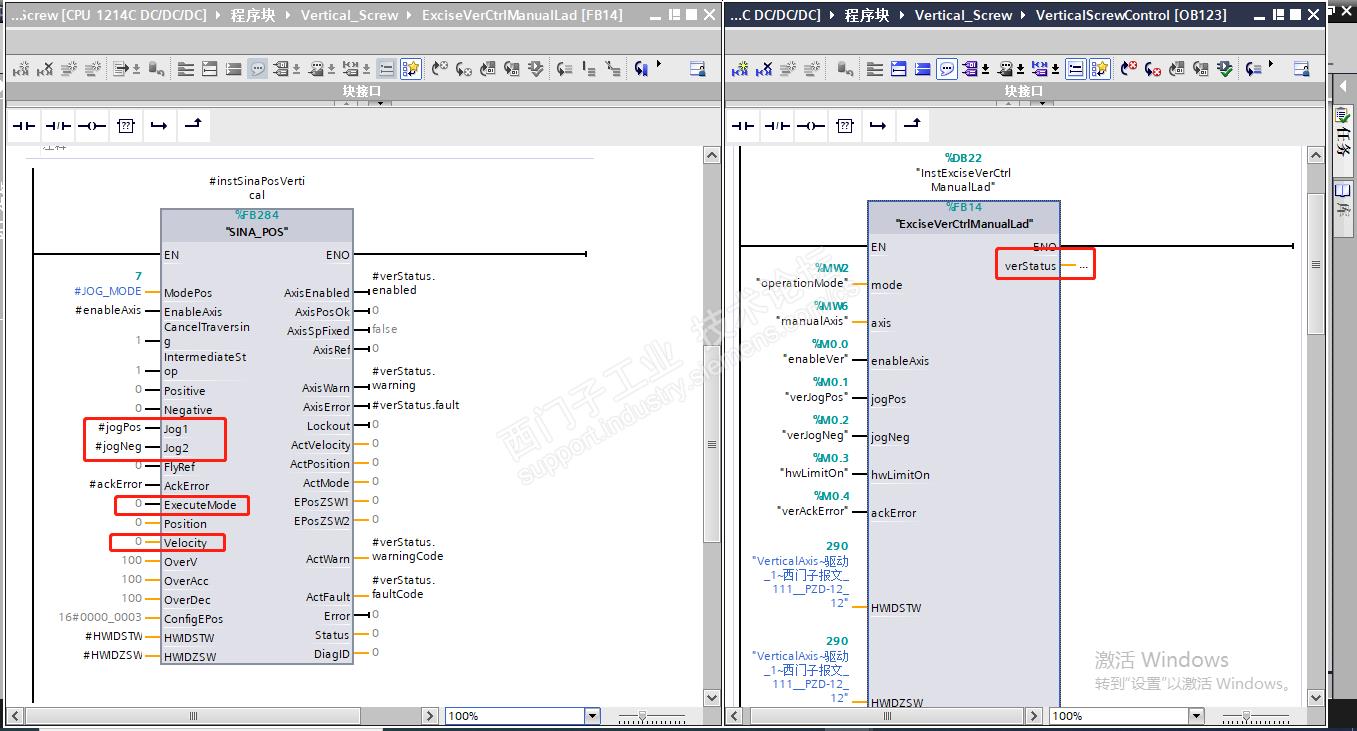
老师,这里的Jog1应该是正向点动,Jog2是负向点动吧?那是怎么样把他们分别设置为一个正向一个负向的呢?
ExecuteMode这里是0,按照课程中所描述的设置模式后要给ExecuteMode一个向上的脉冲信号,为啥这里没有给呢。
Velocity速度的拐角为啥是0?
还有一个问题其实和第一个问题是一样的,就是OB中调用的FB的verStatus拐角状态是怎么显示的。因为FB284的输出拐角都是通过verStatus给的,然后在OB中调用这个FB块的时候只有一个verStatus拐角。
















 官方商城-正品备件
官方商城-正品备件
 DIOMIS
DIOMIS 西门子中国
西门子中国


 普通
普通


 本版热门话题
本版热门话题

 相关推荐
相关推荐 相关帖子推荐
相关帖子推荐












