大家好,有个原理性的问题想在这论坛里找大神们探讨帮帮忙,先说声谢谢。
这个问题也纠结了一段时间了!
S7-1200、S7-1500T、V90 PN,我一直是这样的配置做一些非标设备的运动控制。
位置控制时,一般都是使用102报文或105报文,位置环在PLC侧,使用MC_Home 、MC_MoveAbsolute、MC_MoveRelative、MC_CamIn等做定位控制或同步控制。
图:102报文与105报文
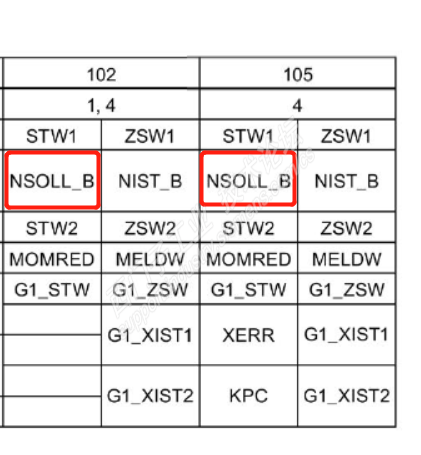
看这报文,我想不明白,伺服接受的是PLC的转速设定值数据,而伺服却可以很准的定位在我们想要的位置?
我想是不是这样的:PLC侧位置环算出要走的位置,然后依据总线时间,把位置换算成速度,然后通过报文发送给伺服,伺服这边收到PLC侧发过来的转速后就旋转,但也有个总线时间,这个总线时间跟PLC是同步的,时间到了就让伺服停止,等于说:伺服这边是用速度*时间=距离,这样的一个方式来走出PLC侧算出来的要走的位置的?
















 官方商城-正品备件
官方商城-正品备件
 DIOMIS
DIOMIS 西门子中国
西门子中国


 普通
普通


 本版热门话题
本版热门话题

 相关推荐
相关推荐 相关帖子推荐
相关帖子推荐












