西门子的老师您好,
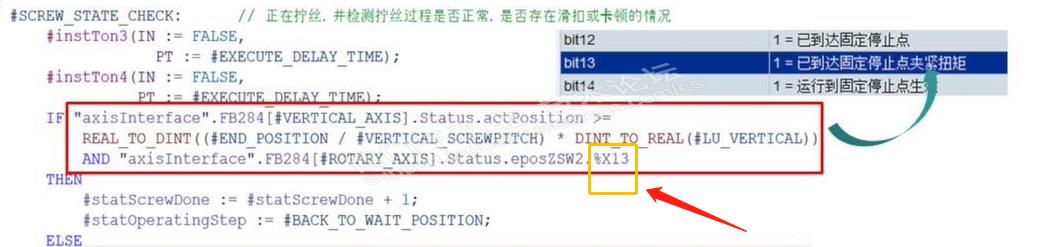
问1:Bit13置1只是表达已经达到了设定的扭矩,当Bit12置1才表示到达了固定停止点。但是课程中为什么是通过Bit13来表示已经到达固定停止点?
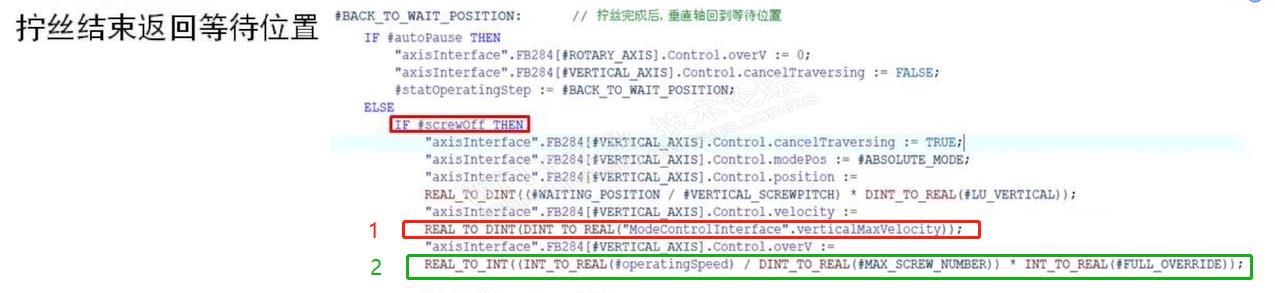
问2:在下面这张图中红色圈出的程序,
REAL_TO_DINT(DINT_TO_REAL(ModeControlInterface.verticalMaxVelocity)); DINT转REAL,REAL再转DINT,这里的数据转换不是多余的吗?因为它就一个数值啊。
问3:绿色圈出的程序
“operatingSpeed”这个数据类型的转换是不是错了,变量表定义的是DINT。
因为“operatingSpeed”的数值是人为定义的,我可以定义20,30,40,50,而#MAX_SCREW_NUMBER 和 #FULL_OVERRIDE 的值是一定的,所以当operatingSpeed给定的值不一样的话overV管角的值也不一样,所以垂直电机的运行速度就不一样。但是拧丝电机运行程序段2里面反向相对定位的速度是固定的。他们的速度如何成比例关于运行啊?(也就是再松丝的程序中并没有根据垂直电机的速度为拧丝电机设定速度)

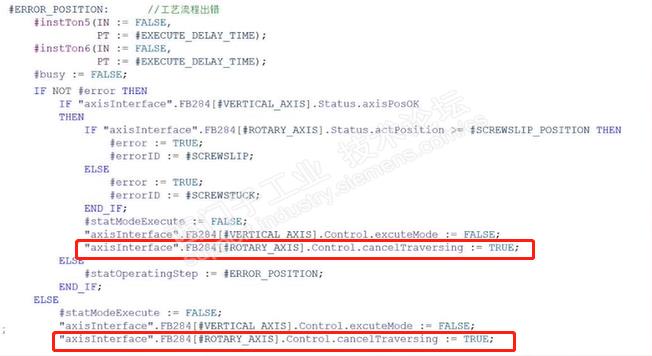
问4:为什么在发生错误的情况下不“取消当前拧丝轴的任务”反而要“不取消当前拧丝轴的任务”?










 技术支持
技术支持 AI小西
AI小西
 风驰卡
风驰卡 产品入门
产品入门 在线产品选型
在线产品选型 售后登记和质保查询
售后登记和质保查询

 备件商城
备件商城 ASP工程师验证
ASP工程师验证 ASP公司证书验证
ASP公司证书验证 售后服务常见问题
售后服务常见问题 首页
首页 售前文档(样本、宣传册等)
售前文档(样本、宣传册等)  售后文档(FAQ、手册等)
售后文档(FAQ、手册等)
 首页
首页 立即开通1847会员
立即开通1847会员 首页
首页 教室培训课
教室培训课 取证训练营
取证训练营 在线自学课
在线自学课 认证证书查询
认证证书查询 培训伙伴验证
培训伙伴验证 首页
首页 最新发帖
最新发帖 精华帖
精华帖 发新帖
发新帖 已解决问题
已解决问题 精华常见问题
精华常见问题 自动化标准机型应用中心
自动化标准机型应用中心 官方商城
官方商城 西门子中国
西门子中国


 普通
普通


 本版热门话题
本版热门话题

 相关推荐
相关推荐 相关帖子推荐
相关帖子推荐












