














 官方商城-正品备件
官方商城-正品备件
 DIOMIS
DIOMIS 西门子中国
西门子中国

 钻石
钻石

 本版热门话题
本版热门话题

 相关推荐
相关推荐 相关帖子推荐
相关帖子推荐
恭喜,你发布的帖子


发布于 2021-09-21 09:01:43
36楼
通过P341和P342来达到更改启动时间, 和改变惯量模型。 这个我能明白。
有两个问题:
更改r345, 加速度预控的输出也会成比例变化, 是够要相应的修改P1496? 若干这样, 修改启动时间对加速度预控没有影响?
图2,的惯量模型, 貌似只有转矩控制模式才起作用,而且, 上次我发的帖子, 一直没搞清楚后面的Pre control speed , 和电机模型的输出叠加, 怎么就成了实际速度r63?
引用32楼详细内容:
你能读懂下面的两张图吗?
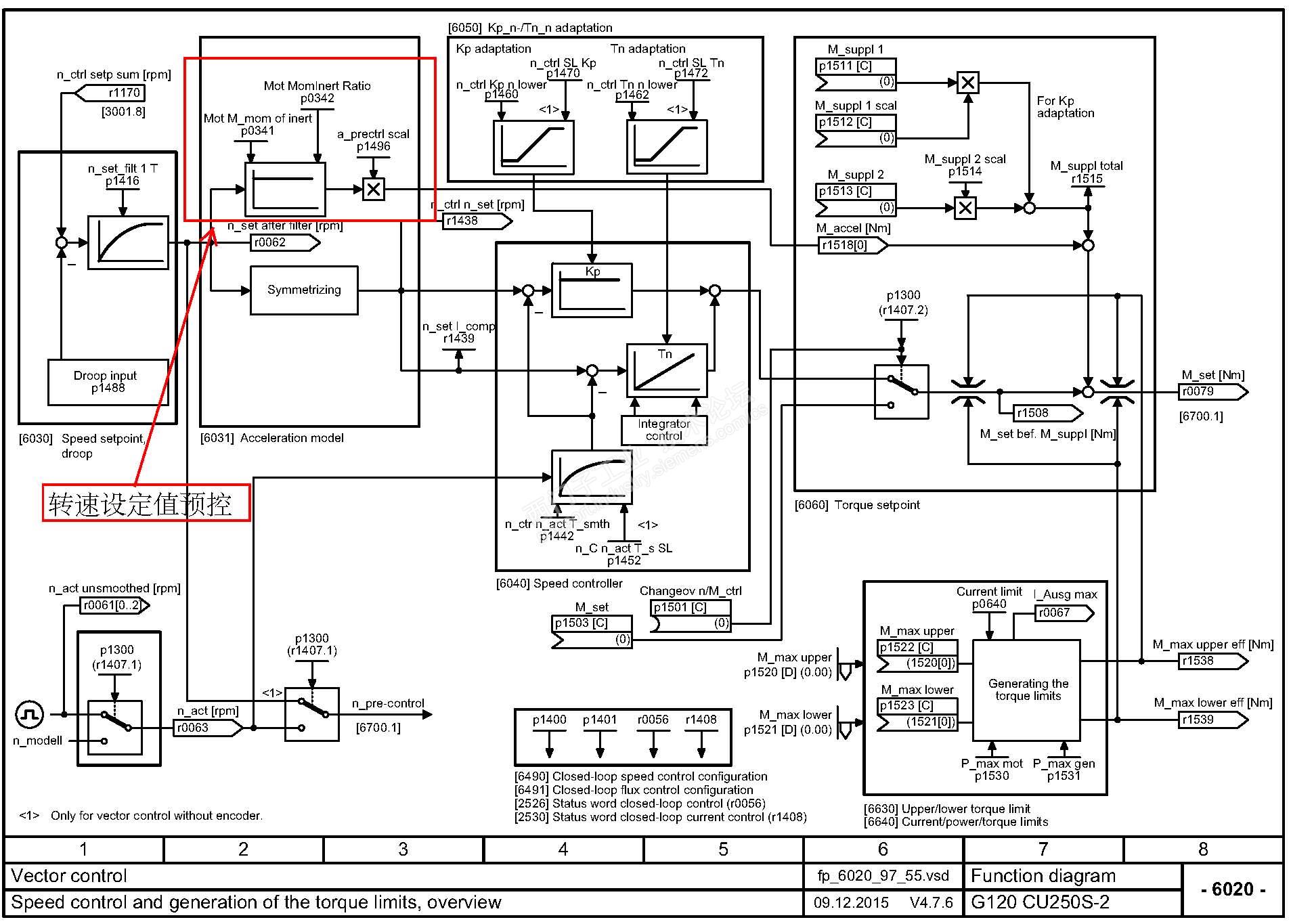

这两张图,对速度设定值和速度实际值都使用了同样的负载惯性模型。一个是以速度设定值为关联,另外一个是以转矩设定值(实际上就是速调的输出信号)为关联。用系统的启动时间(惯性)去做动态的预控(补偿)。
如果你还是不知道r345是由谁决定的?那我就无语了。我觉得你应该上机操作。只有动手,才能更好的对照原理图(功能图)解惑。
关于图2,你可以看它的输出,去的是图6730吧,在那张图,它与转速实际值叠加了。什么意思?就是实时在速度实际值上对转矩的变化量做一个动态的补偿。当然,注释里讲仅针对SLVC系统。
看西家传动的功能图,可以学习和认识西家传动的闭环控制策略和技术风格。为日后自己做闭环控制的设计提供一个思路和参考。比如说,将来你如果用DCC去做一些复杂的,特殊的工艺控制时,就会考虑如何自己去加一些动态补偿,以满足设定值和实际值快速跟随的需求。
本楼说飞剪控制的精华帖,就是一个经典的例子。如果没有补偿或者叫预控,飞剪的实际转速在起步状态很难与设定值重叠。这样的快速跟随效果,没有预控根本做不到。
请填写推广理由:

分享
只看
楼主










