最近有个需求,想算明白epso功能下,已知行程、最大速度及加速度,以及加加速度的前提下,本次行程的理论用时。
总行程S,最大速度V,加速度a,加加速度j,理论用时T。
按照V=a*t,a=j*t,
V=0.5*j*t^2等相关公式计算公式计算;
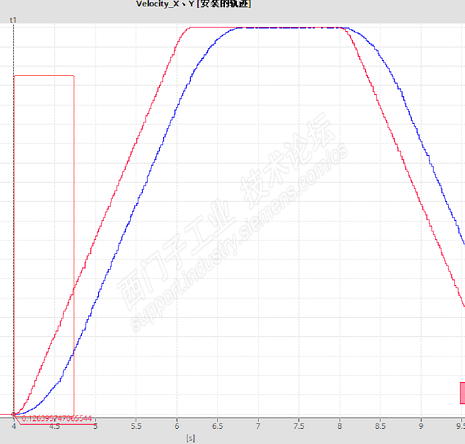
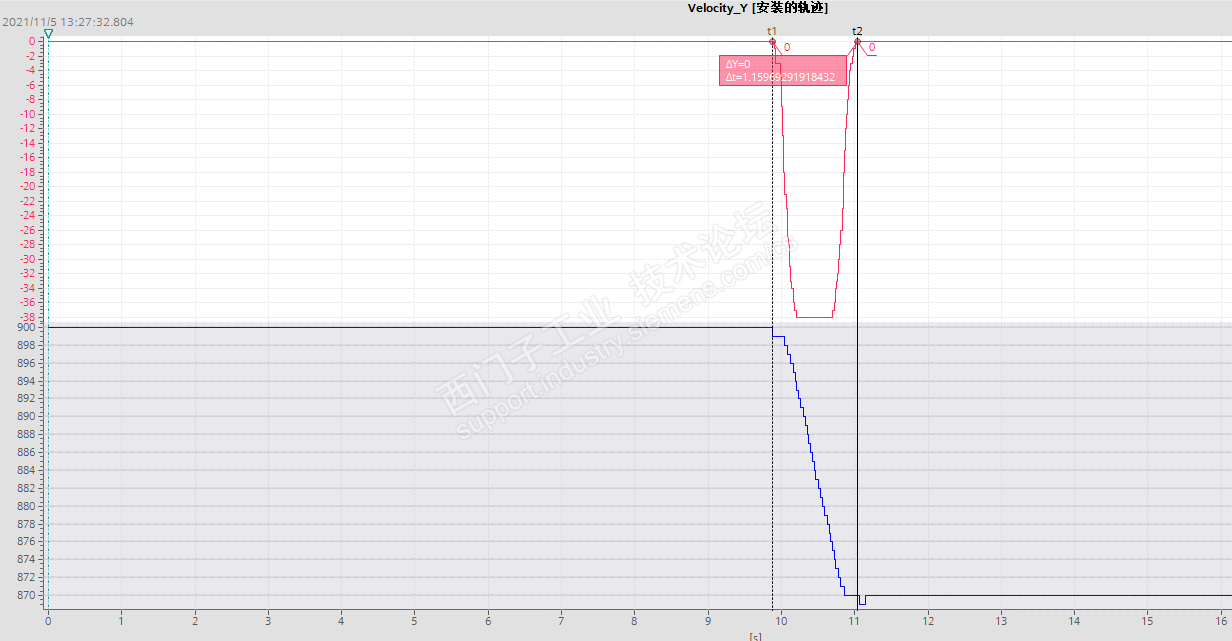
发现EPOS模式下,实际跑出来的曲线和上述公式计算的是不一样的;
也对比过PLC组态的定位轴工艺对象,里面也涉及到类似几个参数,实际测取的时间和公式计算的是比较贴近的,也就是感觉工艺对象里面,的确是按照v,a,j等这个几个求导公式来进行定位过程中速度设定的;
而epos模式下,貌似有比较多的限制,查看驱动参数的帮助也的确发现有一些特别的说明,但是还没有完全搞明白,因此想在此讨论一下,看看是否有熟悉这块的,能够更快的找到计算办法。
我的疑问是,看帮助,
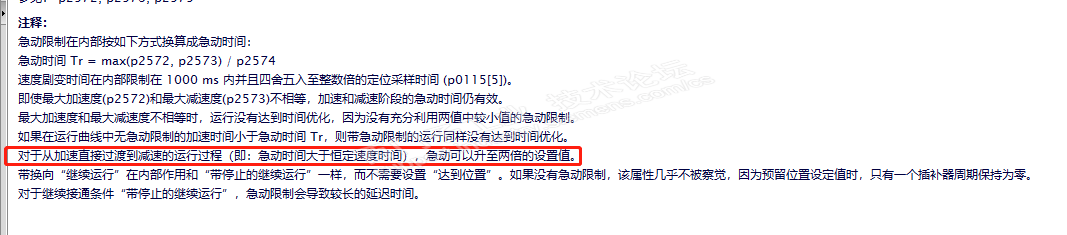
驱动器里面在进行速度设定时是使用的“急动时间”,而不是单纯的a=j*t,虽然驱动参数里面设定的是jerk以mm/s^3秒的单位,但是实际内部运行时,是转换成了时间的。如果epos进行了加速度缩放,那当前实际的jerk或者说本次行程的j就不是参数P2574里面设定的那个了,也就是如果加速度进行不同的缩放,jerk是变化的?
另外,帮助里面关于急动时间限制在1s以内,是指如果jerk设定很小,加速度设定比较大,a>J,驱动器也会强制让急动时间不大于1s,并进行相应的四舍五入,这个还比较好理解;
“如果在运行曲线中无急动限制的加速时间小于急动时间Tr,则带急动限制的运行同样没有达到时间优化”这句怎么理解呢?意思是如果从曲线形状看,如果加速过中斜线时间小于曲线时间会进行特殊的处理?
帮助里面其他几句也不太看明白,把图贴一下。
期望能抛砖引玉。

















 官方商城-正品备件
官方商城-正品备件
 DIOMIS
DIOMIS 西门子中国
西门子中国


 黄金
黄金


 本版热门话题
本版热门话题

 相关推荐
相关推荐 相关帖子推荐
相关帖子推荐












