上一期讲到料架的控制部分,这一期主要料架的扫描。
料架门可以被打开之后,操作工可以更换料架里面的电极。料架中的每一层有一个光电开关用来检测料架层是否更换电极,没有更换电极的料架层是不需要KUKA机器人上的RFID扫描。图1所示就是料架层标志位赋值1,料架层的料位扫描状态为0。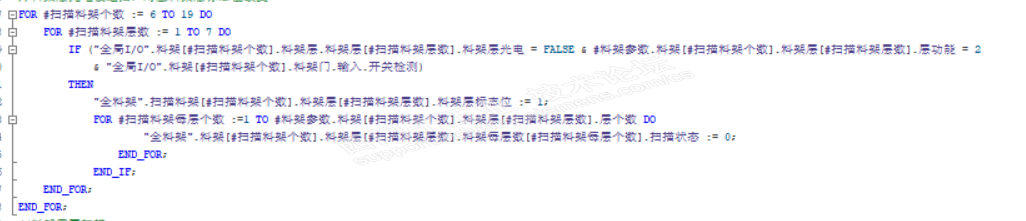
由料架层标志位的值判断料架是否需要扫描,再由料架层的首末料架位的扫描状态决定料架层标志位的值,最后需要料架扫描标志位复位。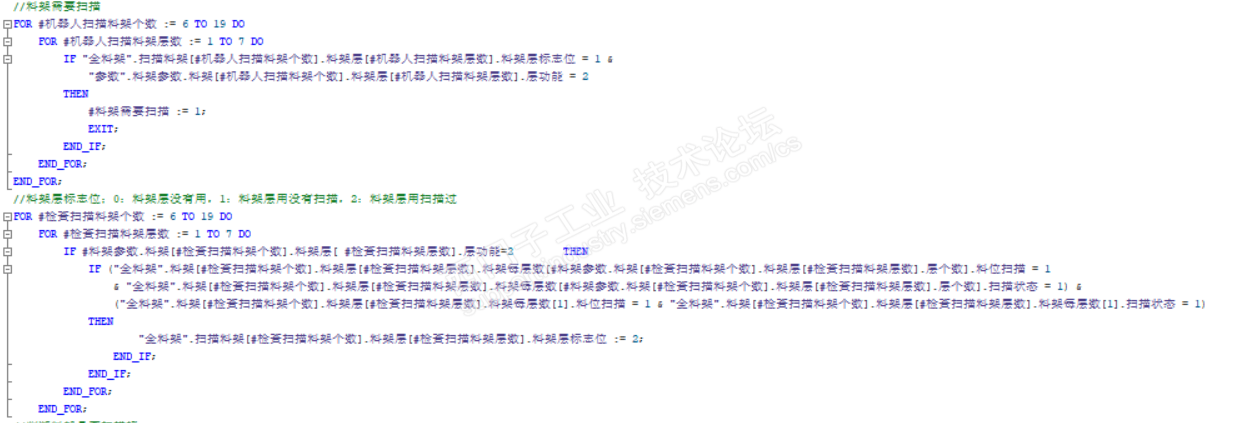
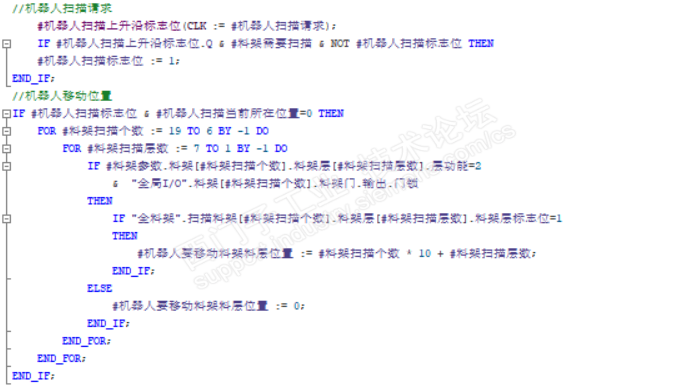
料架扫描需要向KUKA机器人发请求,并也需要PLC给机器人移动的位置,图中移动位置是人为制定的。
在KUKA机器人扫描过程中,也需要机器人所在当前位置信息给PLC。PLC需要所在位置得到料位的信息判断当前电极的条形码是否给到上位机和当前料位状态。以这个信息也能判断当前料位是否由错误。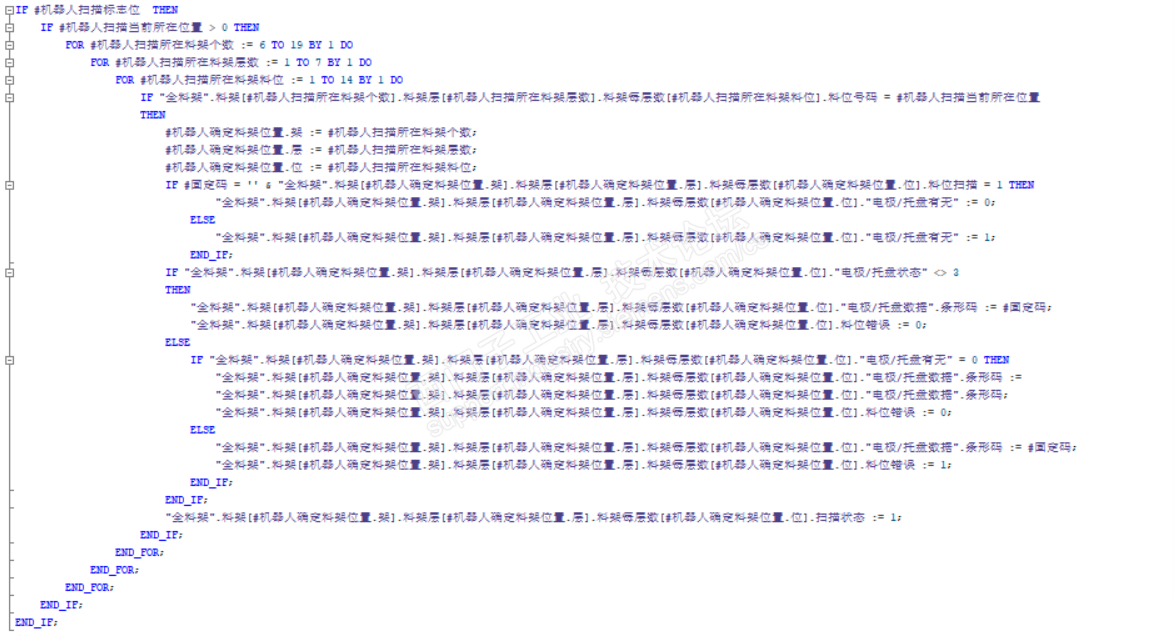
如果机器人读取RFID条形码的动作速度太快,有可能是要出问题,可以降低机器人执行动作速度慢点。















 官方商城-正品备件
官方商城-正品备件
 DIOMIS
DIOMIS 西门子中国
西门子中国



 普通
普通


 本版热门话题
本版热门话题

 相关推荐
相关推荐 相关帖子推荐
相关帖子推荐












