时隔多年再一次在西门子论坛发帖,感慨万千,这篇作为我的2022年第一篇吧。
关于ADRC控制算法感兴趣的小伙伴搜索韩京清研究员,和高志强博士的论文书籍,这里就不在赘述:
非线性adrc源自经典PID与现代控制理论的结合,针对PID的固有缺点,韩京清研究员提出可从4个方面改进:以扩张状态观测器来估计系统总扰动,以跟踪-微分器来实现微分信号的可靠获取,以安排过渡过程来减少给定突变引起的系统大幅度超调,以非线性状态误差反馈控制来改进控制效果。
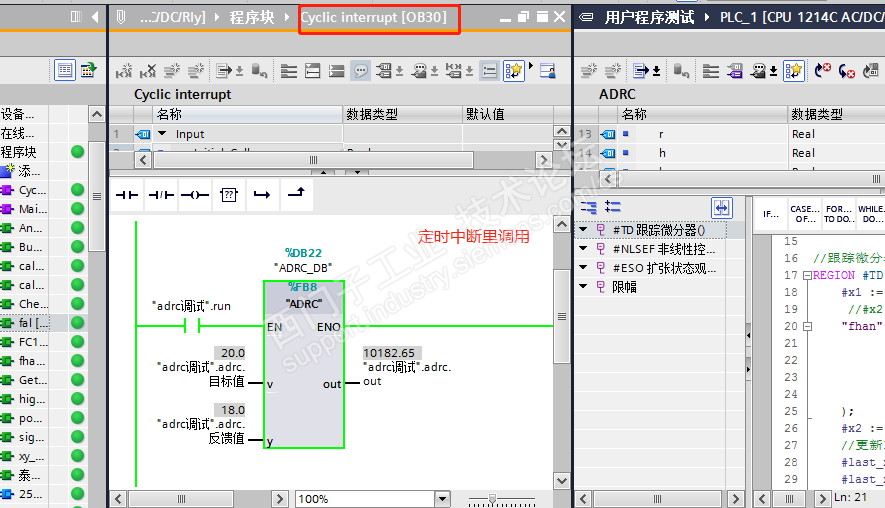
1、基于博途平台的adrc控制器
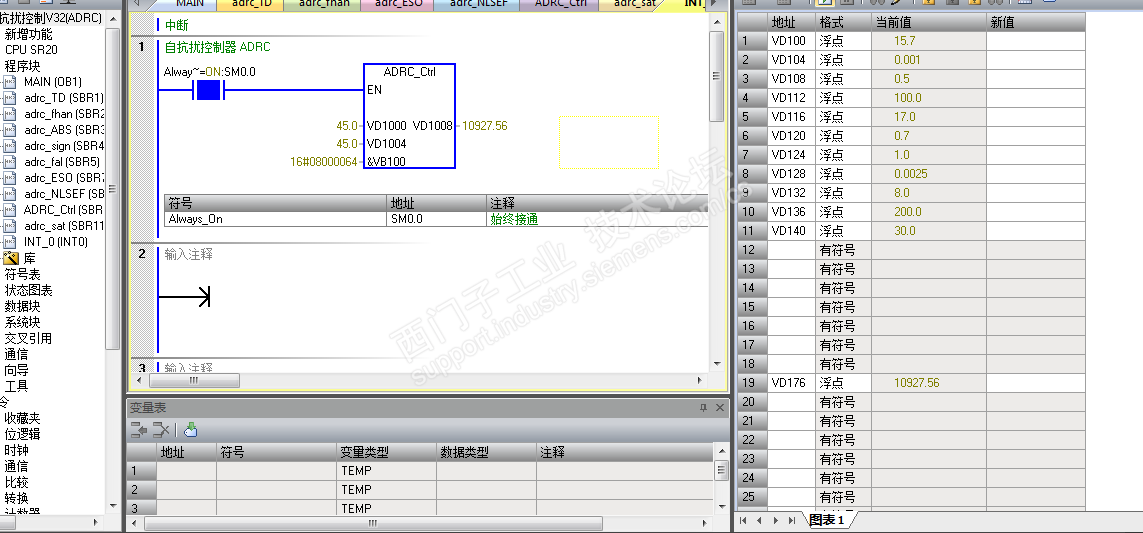
2、基于smart平台的adrc控制器
















 官方商城-正品备件
官方商城-正品备件
 DIOMIS
DIOMIS 西门子中国
西门子中国


 普通
普通


 本版热门话题
本版热门话题

 相关推荐
相关推荐 相关帖子推荐
相关帖子推荐












