















 官方商城-正品备件
官方商城-正品备件
 DIOMIS
DIOMIS 西门子中国
西门子中国

 钻石
钻石

 本版热门话题
本版热门话题

 相关推荐
相关推荐 相关帖子推荐
相关帖子推荐
恭喜,你发布的帖子


发布于 2022-11-05 20:03:10
14楼
对于驱动来讲,在总线结构通讯中,对一个驱动从站顺利发送/应答完成,可能需要30 ms(115200 ),若对接近10台的轮询,可能就需要300ms(实际会更长)。这对于产线来说,已经是有“前后不同步”的问题了。(更别提9600了)
其实,在驱动从站侧,是有不同通讯响应机制的。
1、配置报文。一旦配置好报文,(数字化)从站将时刻更新主站要读写的数据。随时做出响应。
2、非配置的读写;
从站将在通讯处理段分次处理。对于RAM写快/读慢。而要写入ROM是最慢的(正确写入后,才给予通讯完成响应。)
3、立即执行,无响应。(总线形式的都有这种命令。)
第三种,就是广播。MB是地址0、USS是地址31。当写入所有驱动统一(转速)设定值/启动命令时,所有驱动同时动作、同时变化,且不返回数据。
实际运行中,驱动侧由于设定值有比例系数,所以,仍是按不同比例在运行。
现在的问题是,一般都不提供这种广播程序快。需要自己写。
所以好奇。
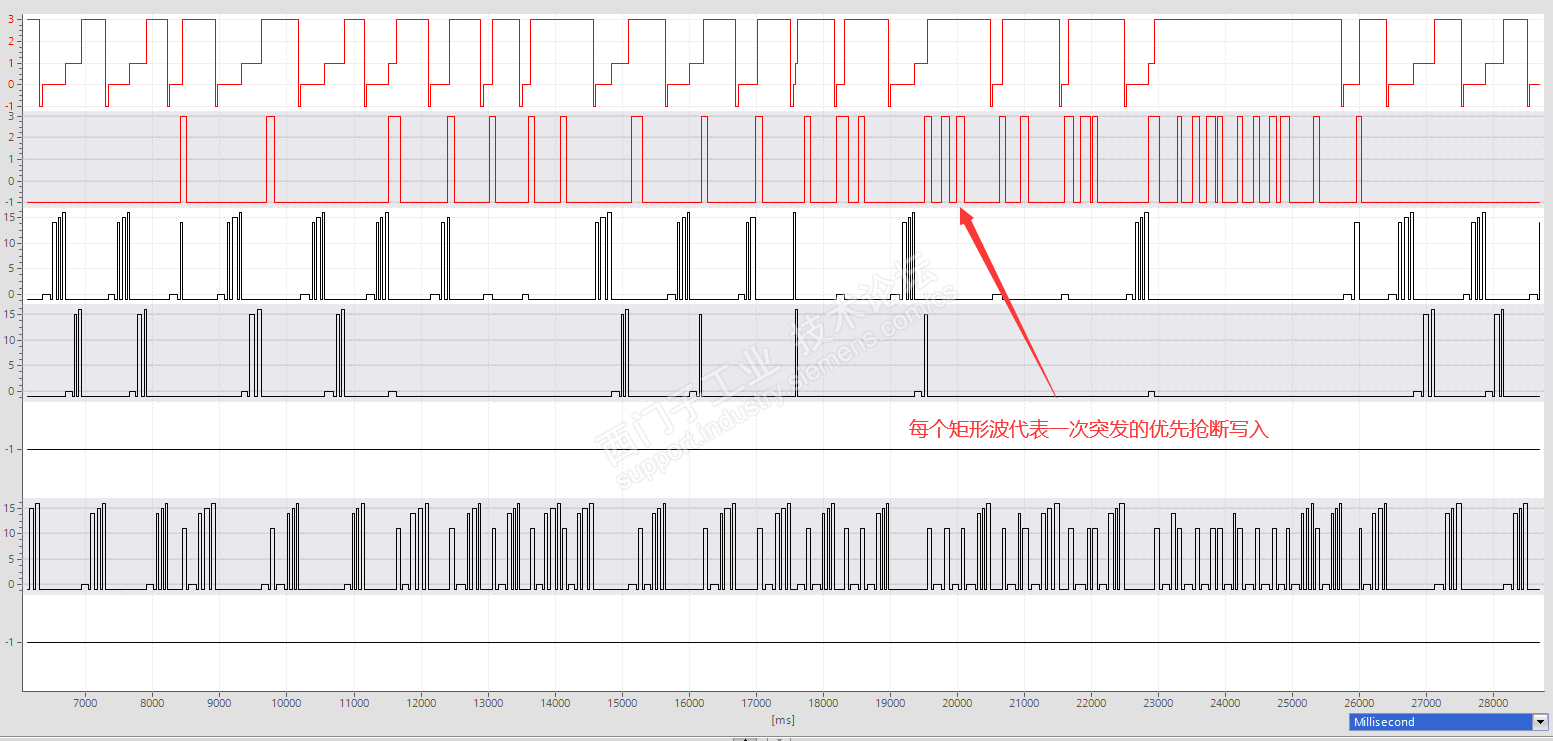
这样的场景,用前面提到的调度结构理念,优先权抢断广播(写0站),肯定可以。
不管从站挂接有多少,优先执行都是非常快的,仅受限于扫描周期的长短。
但UDP会更好,毕竟MB慢,易干扰。MB根本上不适合要求非常快的场景。
我理解的通信设计,还是要首先从案例需求的根本出发,扩大考量范围。不首先限定于串口还是以太网的某种技术手段。这也就是ElonMask嘴里说的第一性原则。
特别高速的通信需求,PLC就已经有些不适合了。因为一般的PLC编程无法运用多线程,反正我是没见过,CPU资源利用率低。扫描周期的存在,就是个固定的单线程,这是瓶颈。
当然,PLC本身就像面向易用的编程产品,底层的深挖掘和细化定制能力肯定锁死或受限,这是平台的天生局限。
高速通信要求,程序员必须能驾驭每个独立的静态线程,和上位机开发中的策略一样。针对多个设备节点的多个独立静态通信线程,常驻内存,实时的,在平行监听和运转。那个反应速度,PLC根本比不了。我在上位机实测过,TCP传输就比S7快50倍速度。UDP没测过,但肯定更快。
现在上位机开发,目前最好的还是.Net平台。鸿蒙的仓颉语言一直没出来,用TypeScript,但是其生态已经有2000多家支持。且已经有了十几二十款开发板了,主流SoC都逐渐开始支持。但这个如果不是专业弄,根本干不了,也没这精力和资源。
鸿蒙的软总线,是在操作系统的最底层,解决掉设备自动发现和自动互联的问题。煤矿应用中,30%丢包率的场景下,能做到端到端10ms传输,其中主要就是UDP。软总线把7层模型的底下四层给精简合并了。
我个人非常看好鸿蒙OpenHarmony的潜力,它具备颠覆性的工业潜力。目前我知道的国内PLC厂家,只有汇川在2021年加入支持研发,但不知道他们具体会干啥。
前不久,华为发布了一个硬实时操作系统(RTOS)的内核UniProton。它不采用时间片,完全是按照优先级调度,有三种不同的调度速度快慢的选项。目前它可以同时驾驭多个ARM架构的芯片。实时的面向底层,非实时的面向UI。这就是给未来预备的。
闲扯一堆没用了。
请填写推广理由:

分享
只看
楼主










