









 技术支持
技术支持 AI小西
AI小西
 风驰卡
风驰卡 产品入门
产品入门 在线产品选型
在线产品选型 售后登记和质保查询
售后登记和质保查询

 备件商城
备件商城 ASP工程师验证
ASP工程师验证 ASP公司证书验证
ASP公司证书验证 售后服务常见问题
售后服务常见问题 首页
首页 售前文档(样本、宣传册等)
售前文档(样本、宣传册等)  售后文档(FAQ、手册等)
售后文档(FAQ、手册等)
 首页
首页 立即开通1847会员
立即开通1847会员 标准机型应用中心
标准机型应用中心
 首页
首页 教室培训课
教室培训课 取证训练营
取证训练营 在线自学课
在线自学课 认证证书查询
认证证书查询 培训伙伴验证
培训伙伴验证 首页
首页 最新发帖
最新发帖 精华帖
精华帖 发新帖
发新帖 已解决问题
已解决问题 精华常见问题
精华常见问题 官方商城
官方商城 西门子中国
西门子中国

 钻石
钻石

 本版热门话题
本版热门话题

 相关推荐
相关推荐 相关帖子推荐
相关帖子推荐
恭喜,你发布的帖子


发布于 2022-12-05 08:43:13
15楼
别看坐标变化, 矢量控制听起来很复杂。
其实就一条, 基于基本的转矩公式T = np*Lm*Is*Ir*sinα. Is是定子电流同步矢量, Ir是转子电流同步矢量, 阿尔法是二者夹角.
np是极对数, Lm是定转子同步互感。
以上是基于机电能量转换原理的基本转矩公式。 由于Is, Ir,, α强耦合, 寻找合适的M轴,进行解耦就是矢量控制的目的。 于是, 可以分析出, 基于转子磁链, 也就是稳态转子电流超前90度的位置就是最佳的M轴。
如图
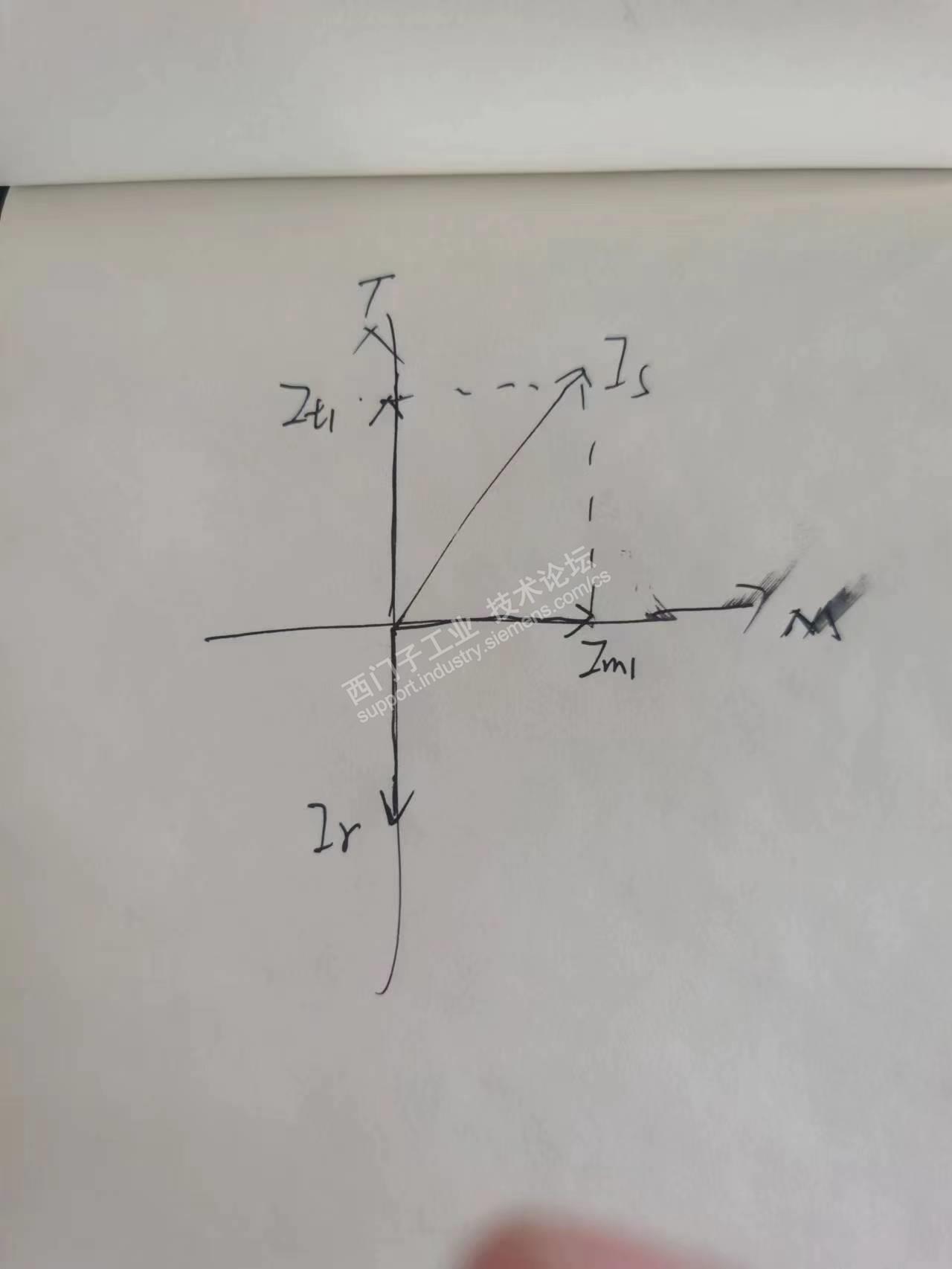
这样变换的结果就是, 转子磁链只和Im1有关, 这样, 可以很容易得出, T = np * Lm*Im1*Ir.
当然, 此时Ir 和 It1是有个跟电感有关的常数比例关系的。 也就是
T = np* Lm/Lr * It1 * Lm*Im1;
也就是 T = K * It1 * Im1. 这样就实现了 定子电流的解耦。
请填写推广理由:

分享
只看
楼主









