









 技术支持
技术支持 AI小西
AI小西
 风驰卡
风驰卡 产品入门
产品入门 在线产品选型
在线产品选型 售后登记和质保查询
售后登记和质保查询

 备件商城
备件商城 ASP工程师验证
ASP工程师验证 ASP公司证书验证
ASP公司证书验证 售后服务常见问题
售后服务常见问题 首页
首页 售前文档(样本、宣传册等)
售前文档(样本、宣传册等)  售后文档(FAQ、手册等)
售后文档(FAQ、手册等)
 首页
首页 立即开通1847会员
立即开通1847会员 标准机型应用中心
标准机型应用中心
 首页
首页 教室培训课
教室培训课 取证训练营
取证训练营 在线自学课
在线自学课 认证证书查询
认证证书查询 培训伙伴验证
培训伙伴验证 首页
首页 最新发帖
最新发帖 精华帖
精华帖 发新帖
发新帖 已解决问题
已解决问题 精华常见问题
精华常见问题 官方商城
官方商城 西门子中国
西门子中国

 白金
白金

 本版热门话题
本版热门话题

 相关推荐
相关推荐 相关帖子推荐
相关帖子推荐
恭喜,你发布的帖子


发布于 2023-03-21 13:00:51
5楼
本贴针对上贴优化了减速算法的尾差处理,使得当变量#减速总距确定时,变量#减速次数的值每次测试都是同一个值(位置定,时间定),尾差处理也使得减速结尾即将停车的时候尽量让SMD72不减速到1这样平滑度和时间稍优,初步做到了定位定时。以下贴出一个全局变量版本的例程。
(一)中断定位梯形减速过程简单推导(考虑V减速始速和V减速尾速)
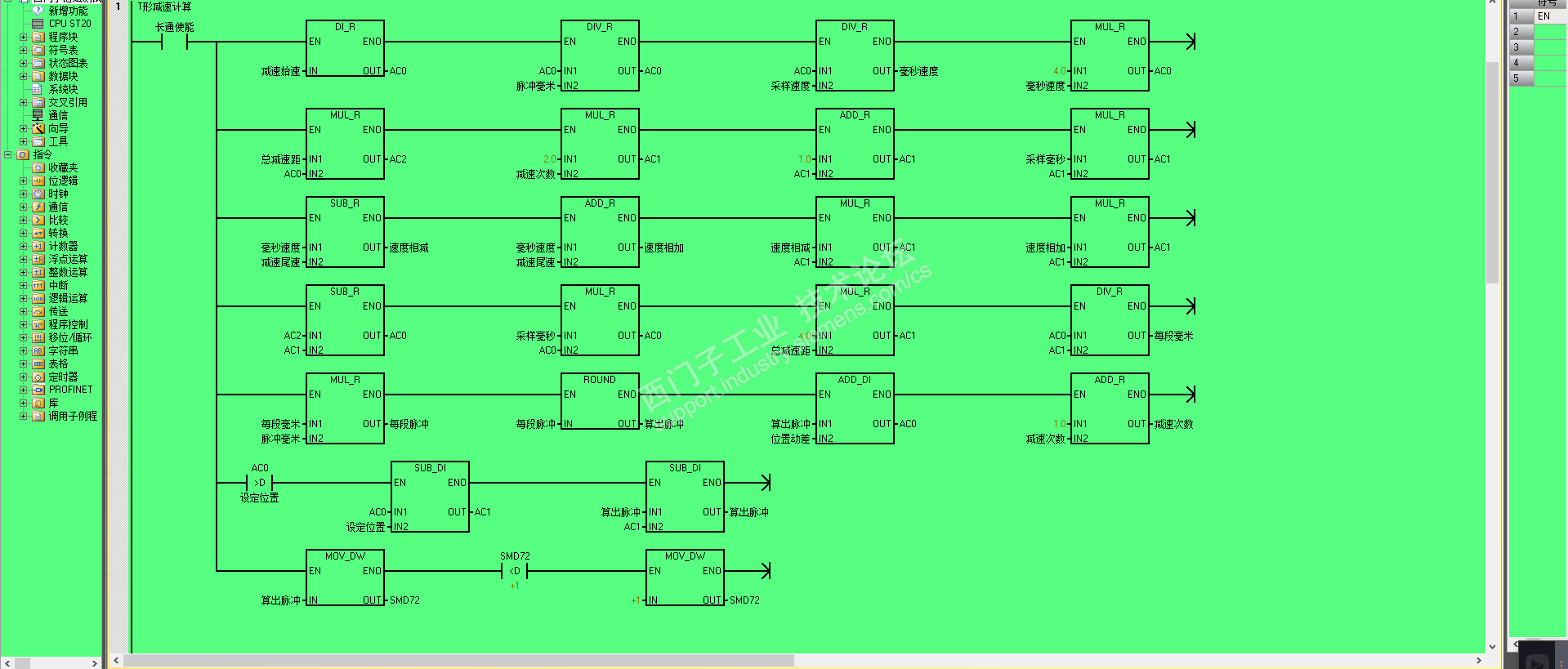
T形减速计算:计算中既有浮点数又有整数,这是非常有必要的,原因是一个脉冲不差要求要用整数加减;而减速过程的精密计算需要用浮点数来运算,最终再化成整数,并做尾差处理;所以浮点数和整数都要用。
1:位推算速:SMW68由SMD72配合Ts==2ms推出,目前简单点就是SMD72/Ts后续可能要缩放处理;
2:减速算法:
01:刚开始进入减速段,S减速总距=减速梯形或三角形面积=(Vmax+Vmin)*T减速总时/2,Vmax==V减速始速;Vmin==V减速尾速(一般等于0.0);Vmax=V减速始速就是在定时中断的中断初始的瞬间采样到的SMW68;以采样时间Ts==2ms将S减速总距划分成n个梯形,最后一个梯形上底长度==0本质是三角形;
02:Ts==2ms,Vmax,Vmin,S减速总距四个参数知道;
03:则算出T减速总时==2S减速总距/(Vmax+Vmin);
04:计算减速度a,每小段梯形的下底长度Vn,上底长度Vn+1;面积Sn;
05:减速度a=(Vmax-Vmin)/T减速总时=(Vmax-Vmin)*(Vmax+Vmin)/(2*S减速总距);
06:Vn==Vmax-(n*Ts*a);(n=0,1,2......)n=0时Vn==Vmax;
07:Vn+1==Vn-a*Ts==Vmax-((n+1)*Ts*a);(这两个公式是理想T梯形等价,S曲线不等价)
08:Sn=(Vn+Vn+1)*Ts/2;
09:Sn= {2Vmax-(2n+1)*Ts*a}*Ts/2={2Vmax-(2n+1)*Ts*(Vmax-Vmin)*(Vmax+Vmin)/(2*S减速总距)}*Ts/2
最终得到:Sn={4Vmax*S减速总距-(2n+1)*Ts*(Vmax-Vmin)*(Vmax+Vmin)}*Ts/(4*S减速总距)
10:浮点数:减速次数:就是n==0,1,2,3,......
算出来的Sn做尾差判断处理以后才能赋值给SMD72;并对SMD72进行下限幅值限幅成1;
尾差处理:就是结尾的几个算出的减速脉冲数加上位置动差不能超过设定位置,否则就会过冲几个脉冲,必须进行简单的加减运算处理过冲,这样的简单处理是非常正确且必要的,这也是需要仔细考虑的。
(二)例程说明:例程经过多次实践测试,自测是正确可用的,减速算法正确,程序一个脉冲也不差,同一个减速距离,减速次数多次测试都是同一个值,说明既能准确控制位置,整个中断定位期间的时间也是非常确定的。即:例程1完成了中断定位准确的定位,且整个定位时间完全可控且确定。仅供参考。
1:初始化必要参数
采样速度=1000.0ms/s
减速尾速=0.0mm/ms
总减速距=5.0mm
脉冲毫米=425.0pp/mm(机械减速比脉冲分辨率等决定)
设定位置==125000==294.117647mm
采样毫秒=2.0ms
初始脉冲=109pp/(2ms)
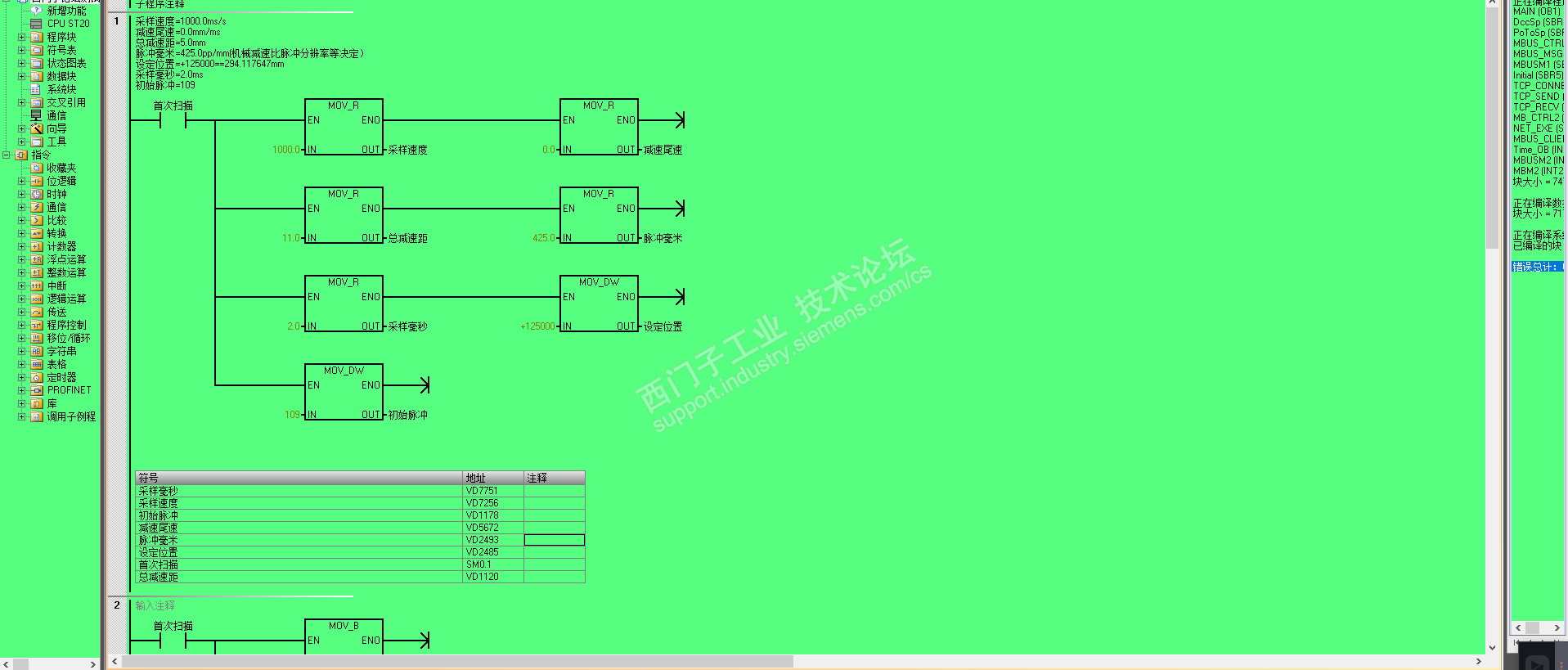
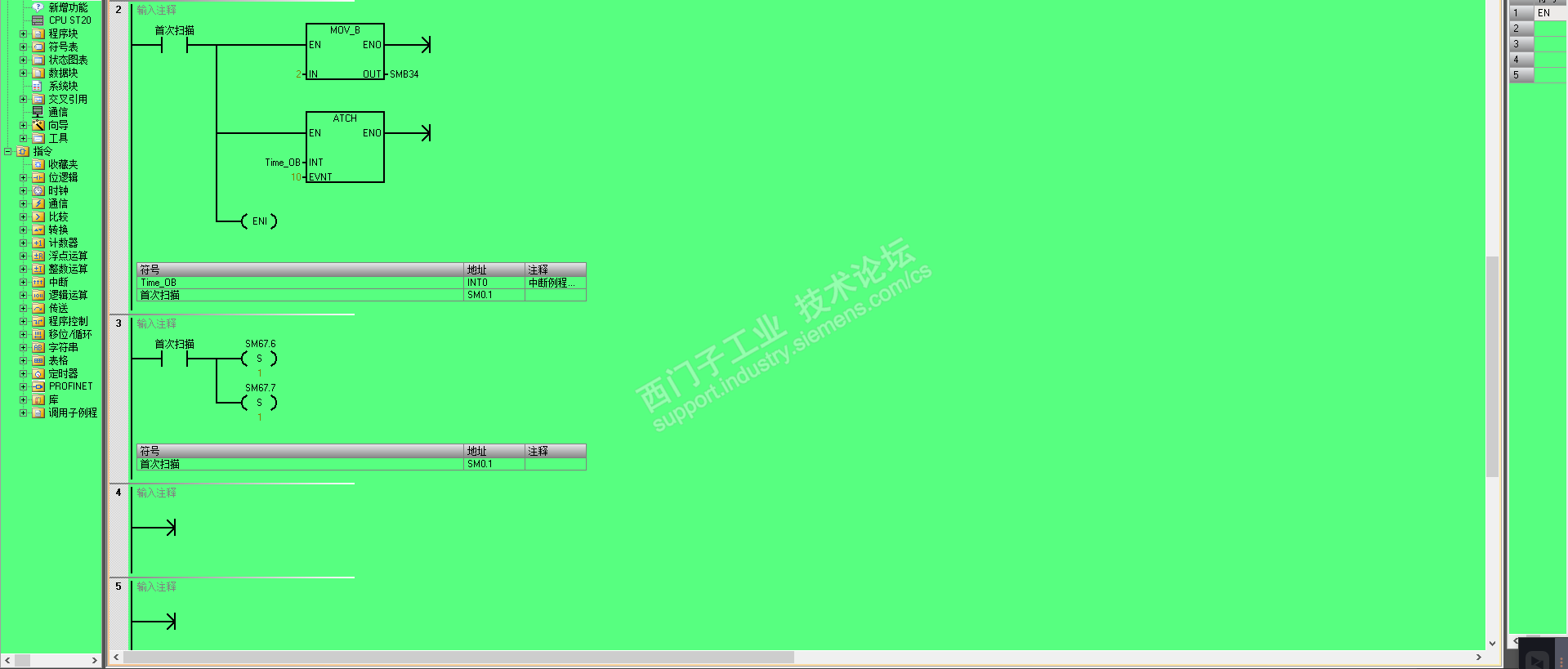
2:初始化2ms的中断和PTO使能位
3:由位置推算速度SMD72推导SMW68

4:减速算法见以上10点
5:定时中断中 运动启停初始化一些标志位

6:定时中断中最主要的运动程序

后续将测试一个中断定位距离一定:S定;且约束定位时间一定:T定,这要求动态计算S总减速距......
进一步是S定,T定,Vmin定且不等于0.0......
请填写推广理由:

分享
只看
楼主









