伺服驱动器最常见的应用是定位控制,其次是速度控制,再其次是力矩控制,但伺服驱动器的核心是力矩控制!
这篇帖子以西门子V90为例,来探讨一下:“如果你只有伺服驱动器的电流环,能不能自己倒推出速度环和位置环”?
先看看旧帖:西门子s7-200smart与v90如何通过Profinet同时控制力矩速度
11楼描述“在PN下,V90只有速度控制和EPOS两种模式,没有转矩!”
大概说的是这里:

1.3版本102报文是有转矩闭环控制的(以前的版本就不知道了,没用过),只是它不在控制模式里去选择,而是通过控制字1去选择:
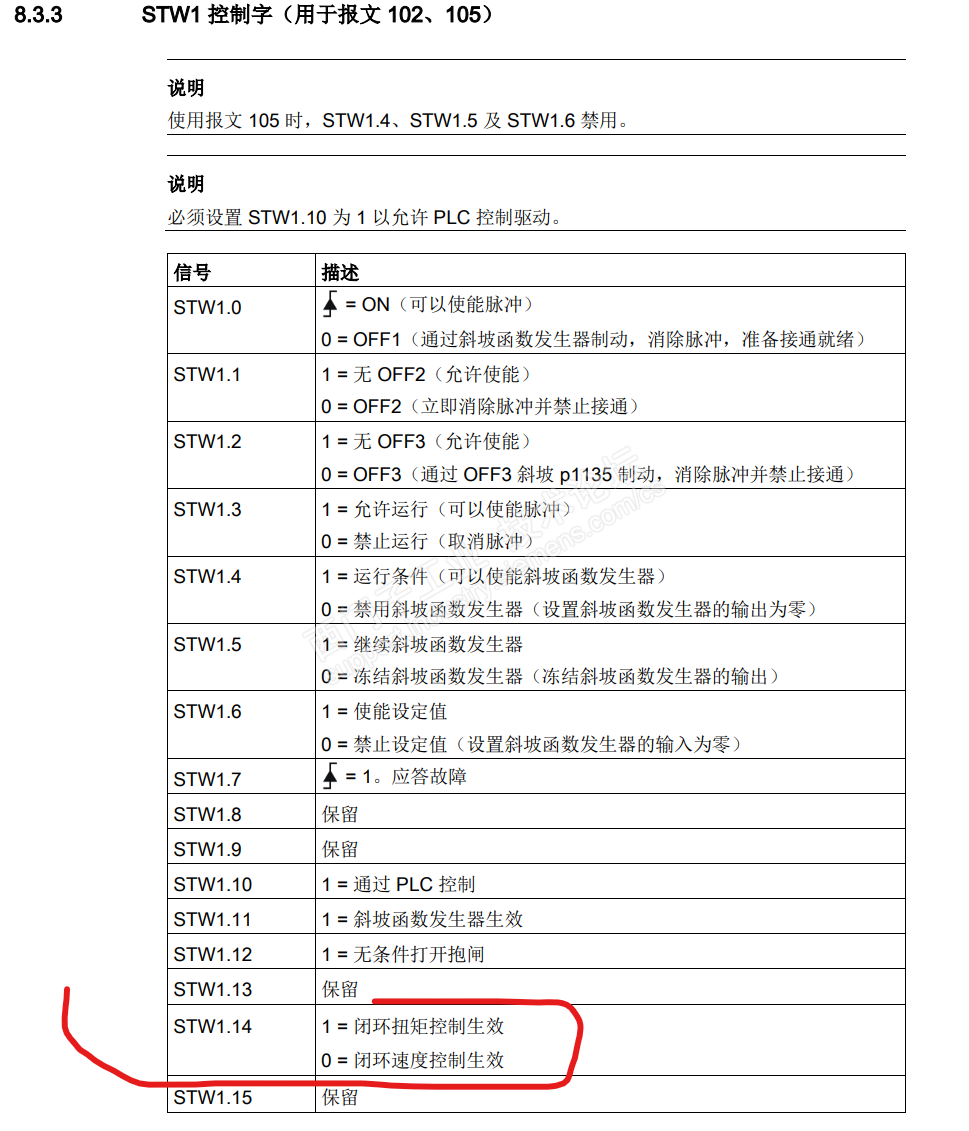
这其实可以非常容易的进行速度/转矩控制模式切换,反而是有道理的,何故?
再看一个帖子:v90 扭矩模式 速度怎么控制?
“设定值大于负载扭矩后,速度一直往上加直到大于速度限制值后驱动报警f7091”
所有的速度限制参数,在扭矩闭环模式下都只能是监视而不参与控制的!这很正常嘛,既然是扭矩闭环,在任何速度下,力矩输出都是你设定的值,优先响应力矩而不是速度。
102报文包含速度反馈和位置反馈,有了这两个反馈值,能不能自己做速度环和位置环?
……港笑啦哟!说点正经的

不能?再叫上自己做的PID运算,能不能?
天下事有难易乎?为之则难者亦易矣;不为则易者亦难矣。
人之为学有难易乎?学之,则难者亦易矣;不学,则易者亦难矣。
……
上面提到的两个帖子,结合楼主的需求,其实不需要用扭矩闭环这个方法来实现,甚至不需要750报文,只是对102报文的“MOMRED”进行控制就能达到需求

伺服驱动器的三个闭环:位置环、速度环、电流环(转矩环),不论外侧两个环是部署在上位机(PLC),或是部署在伺服驱动器本体,核心的电流环一定是部署在驱动器里的,实时性的区别而已;基于驱动器的DSC,或是基于控制器的105报文都能满足高响应需求。
有没有谁想过只靠伺服驱动器的闭环扭矩控制,通过编码器反馈的信号+PID运算(PI)把外侧两个环由虚线变成实线?
噫!微斯人,吾谁与归?



















 西门子商城
西门子商城 西门子中国
西门子中国


 钻石
钻石



 本版热门话题
本版热门话题

 相关推荐
相关推荐 相关帖子推荐
相关帖子推荐












