确实也是第一次接触1500和多重实例
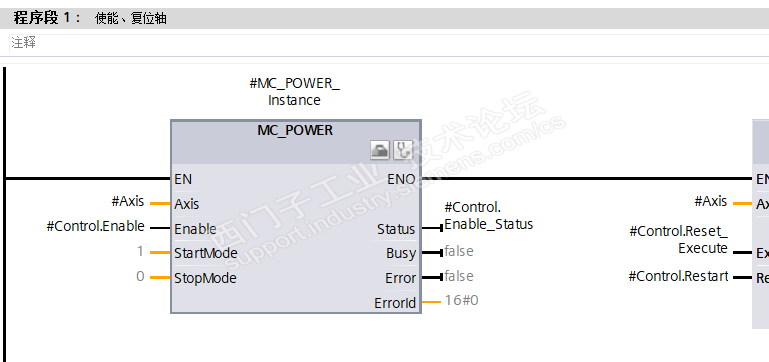
一个项目 有三个轴 我把所有轴指令写在了一个FB2里面 如图一 拿一个指令说明情况
然后在另一个FB1里面多重实例调用 因为有三个轴 就调用了三次 如图二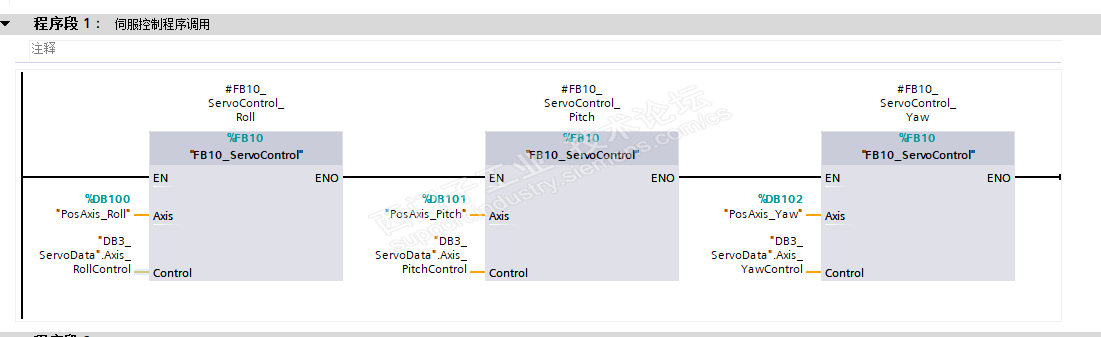
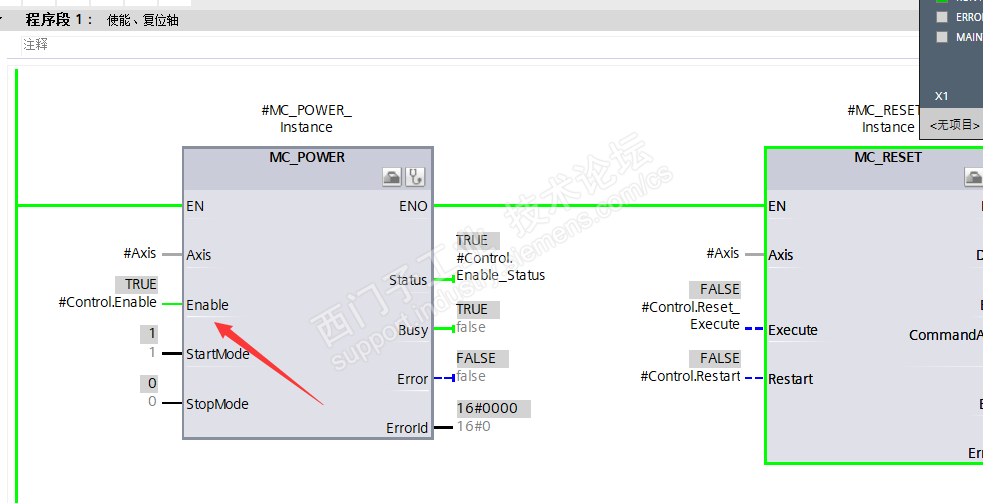
DB3是所有运动控制指令的输入输出数据块 现在有个问题就很难以理解 举例 现在想控制 FB2 中MC-POWER指令 的 Enable 引脚接通 如果是让FB1中调用的第一个多重实例DB3. RollControl 里面的Enable为ture 通过监控 引脚没有变化还是FALSE 如图三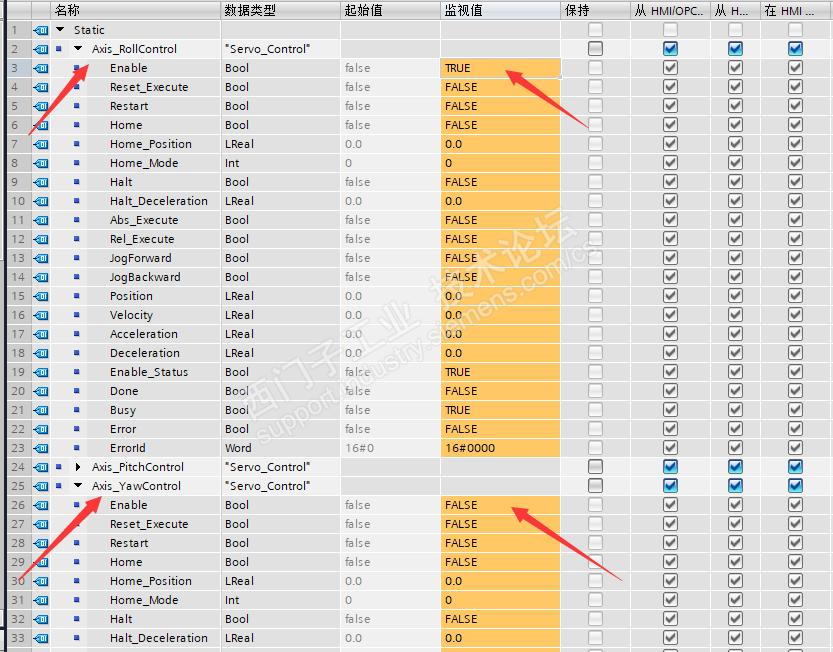
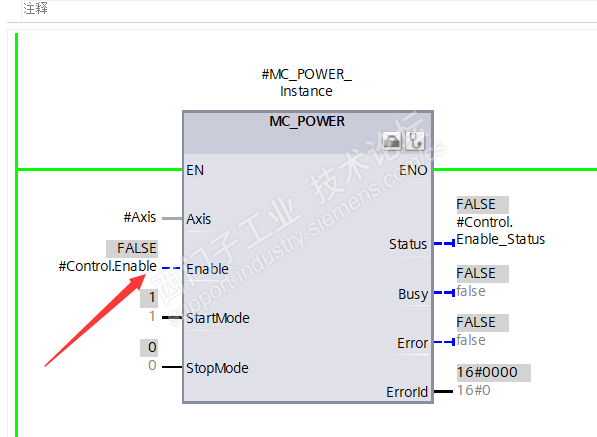
但如果让FB1调用的最后一个多重实例DB3. YawControl里面的Enable为ture 通过监控 引脚就会变为ture 如图四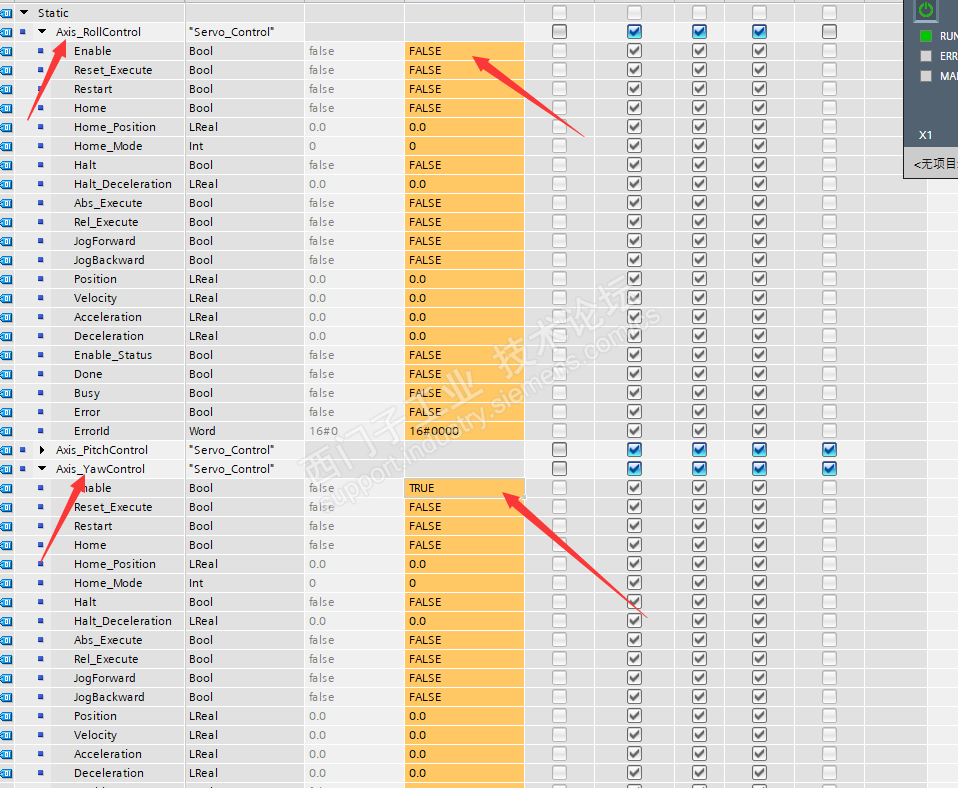
挺急的 大家能不能指导一波















 官方商城-正品备件
官方商城-正品备件
 DIOMIS
DIOMIS 西门子中国
西门子中国


 黄金
黄金


 本版热门话题
本版热门话题

 相关推荐
相关推荐 相关帖子推荐
相关帖子推荐












