









 技术支持
技术支持 AI小西
AI小西
 风驰卡
风驰卡 产品入门
产品入门 在线产品选型
在线产品选型 售后登记和质保查询
售后登记和质保查询

 备件商城
备件商城 ASP工程师验证
ASP工程师验证 ASP公司证书验证
ASP公司证书验证 售后服务常见问题
售后服务常见问题 首页
首页 售前文档(样本、宣传册等)
售前文档(样本、宣传册等)  售后文档(FAQ、手册等)
售后文档(FAQ、手册等)
 首页
首页 立即开通1847会员
立即开通1847会员 标准机型应用中心
标准机型应用中心
 首页
首页 教室培训课
教室培训课 取证训练营
取证训练营 在线自学课
在线自学课 认证证书查询
认证证书查询 培训伙伴验证
培训伙伴验证 首页
首页 最新发帖
最新发帖 精华帖
精华帖 发新帖
发新帖 已解决问题
已解决问题 精华常见问题
精华常见问题 官方商城
官方商城 西门子中国
西门子中国

 钻石
钻石

 本版热门话题
本版热门话题

 相关推荐
相关推荐 相关帖子推荐
相关帖子推荐
恭喜,你发布的帖子


发布于 2023-07-03 09:09:45
34楼
你好楼主,你这个第一个图里面,给定转矩为正,为什么加载电机的实际转矩却为负呢?
引用0楼详细内容:
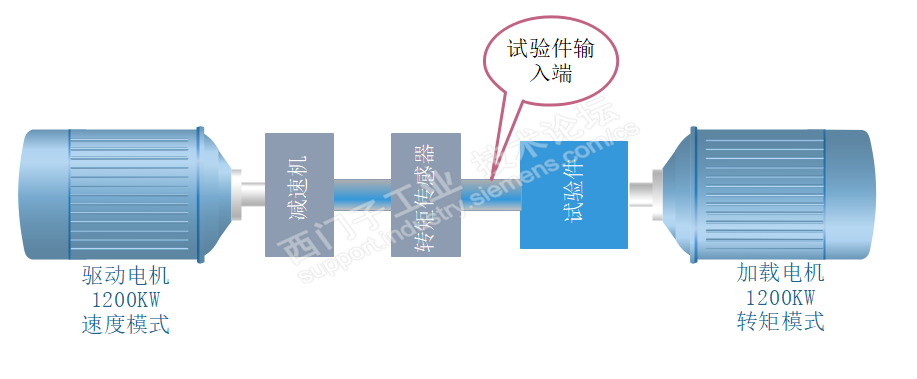
系统描述:系统采用S7-1500通过PROFINET与驱动变频柜S120通讯,转矩传感器品牌为HBM 通过电压信号采集至PLC系统,在PLC中闭环。电机均是带编码器的矢量控制。P1300=21
1、 测试台对托。加载电机转矩模式下,转矩给定为0,使能与去使能,转矩传感器采集到的值有较大差异。
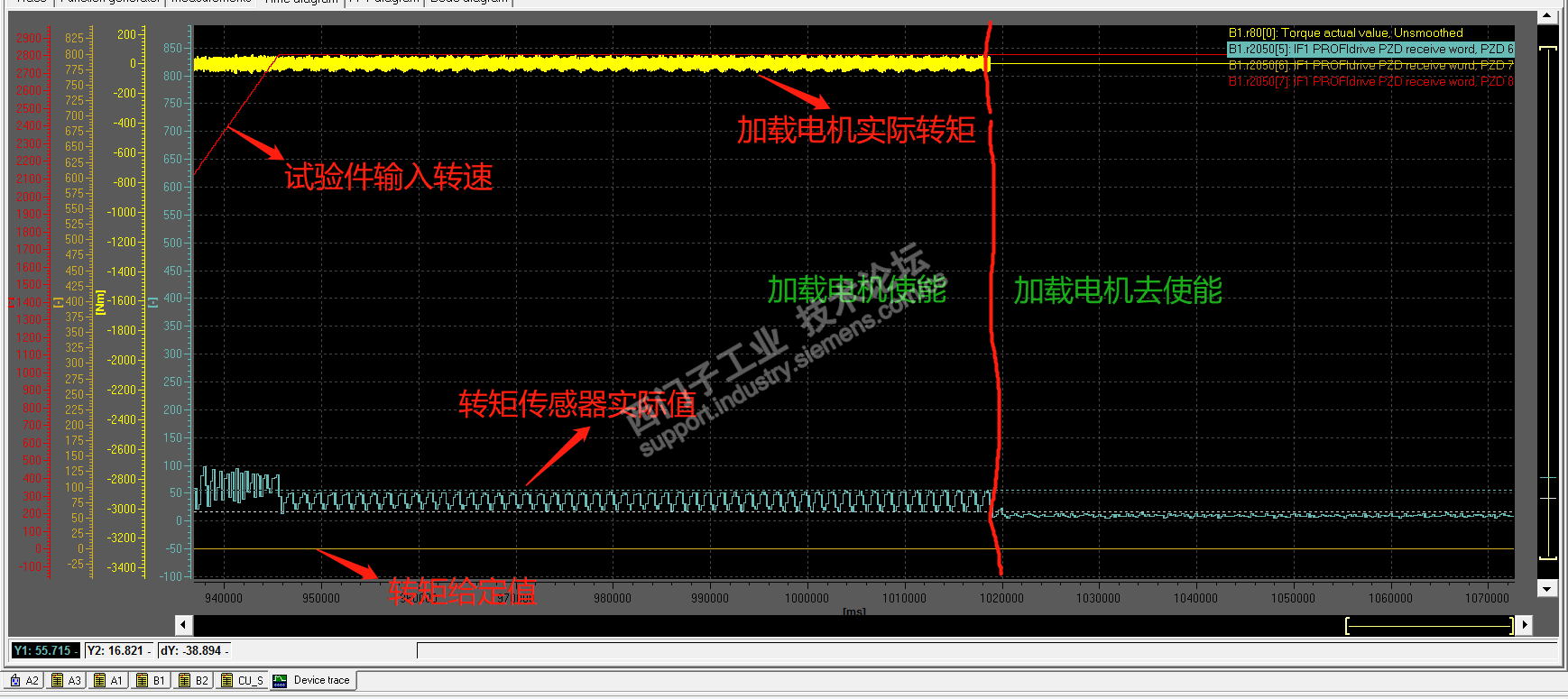
该现象有点想不明白,我的理解是:电机矢量控制,在转矩模式下,转矩给定为0,那使能前后的轴承出力状态应该是一样的。尽管使能后产生了一个励磁电流,但是产生电磁转矩的电流应当是0,这样电机实际转矩为0,那该电机轴承出力状态也应当与去使能状态下一样才对。
2、 动态加载过程中,某转速下加载转矩呈大周期波动。
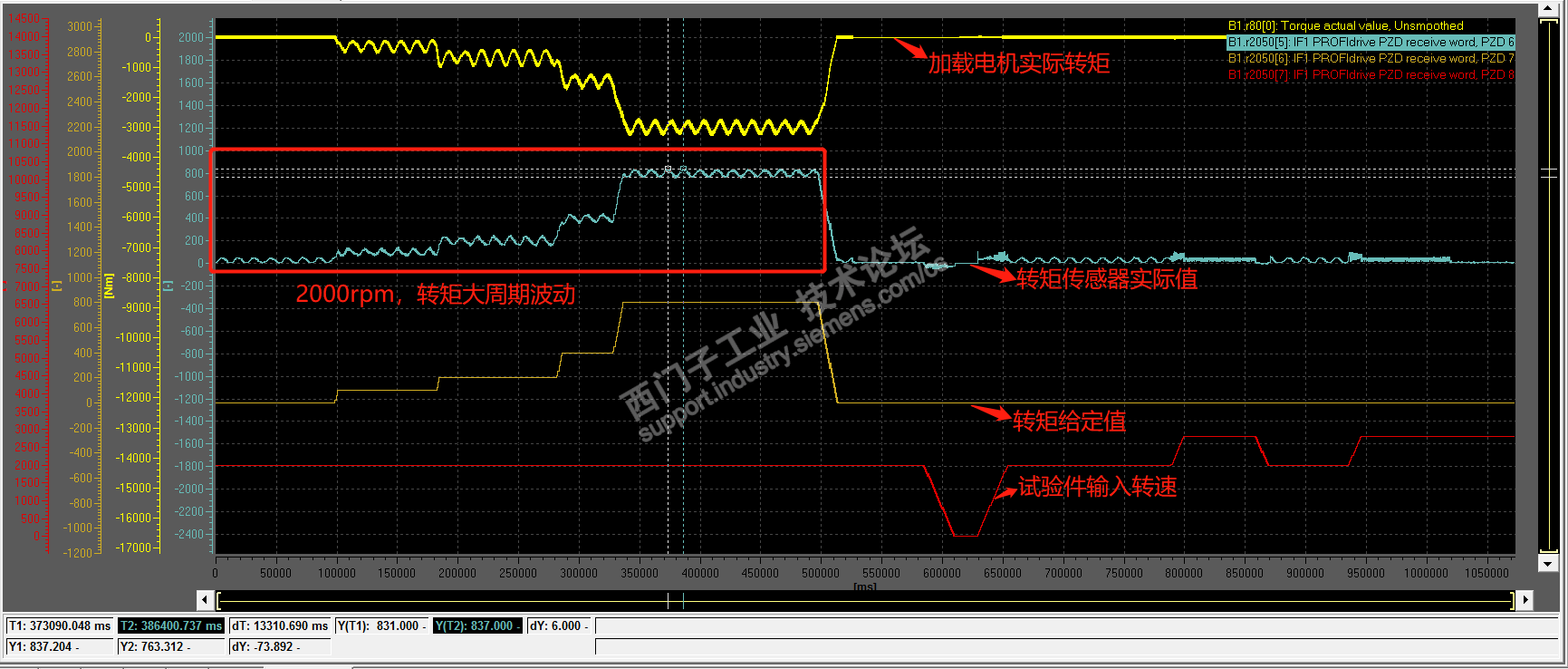
不清楚这种大周期是由什么原因造成的?看了些资料,可能是跟机械有关?是产生扭振了吗?另外这种情况是否可以通过电气上去采取一些措施呢?
铁子们,抱拳了!!
用电机四象限工作图,即可一目了然。
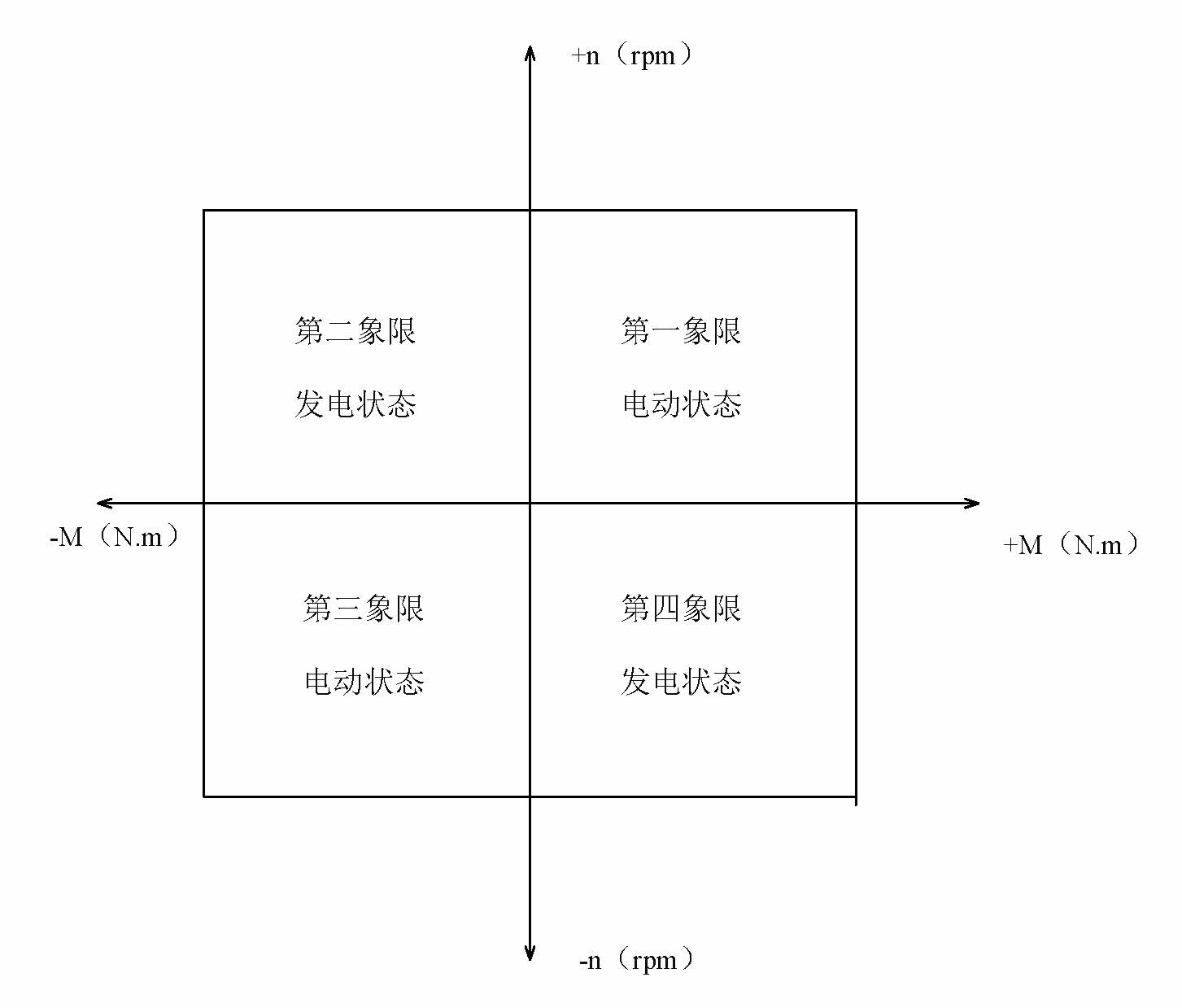
两电机对拖,他们的转速各自是相反的。面对电机输出轴顺时针旋转为正的话,一个正转,另一个就是反转。因为它们的转向是相同的。所以转速的极性就不同。
两电机对拖,一个电机电动状态运行,另一个电机必须发电运行。否则,就不是加载较劲的那种了。两电机对拖就是要实现掰手腕的功能。
由电机的四象限运行图,可以看到。对拖的两电机,电动状态的电机是运行在第一象限,发电状态的电机运行在第四象限。
假如,两个电机此时的转矩极性是相反的,转速极性也是相反的,那说明两电机现在没有工作在一个电动一个发电,而是都工作在了电动状态。此时无法实现掰手腕的那种。此时也可以通过观察西家传动的参数r32来判别。如果对拖的两电机r32的值都大于零,那就是没有人发电,都想同一个方向使劲;只有r32极性不同时,才是两电机的掰腕子状态。
个见,仅供参考。
忘了补充一下,上述说的这些,前提条件是两电机对拖,要先规格化好它们的四象限运行坐标系。也就是两个电机都以自己面对各自的输出轴,顺时针旋转,转速为正。这样定义以后,上述判别才有效。
不过,用西家传动的参数r32来判别电机的运行状态。就无所谓了。只要r32大于0,就是电动,反之亦然。
请填写推广理由:

分享
只看
楼主










