最近,在一个项目中,要求有一个工艺是两轴实时同步跟踪。通过学习西家传动手册相关章节,并用其指导现场调试,获得满意的结果。特此分享。
项目的基本结构
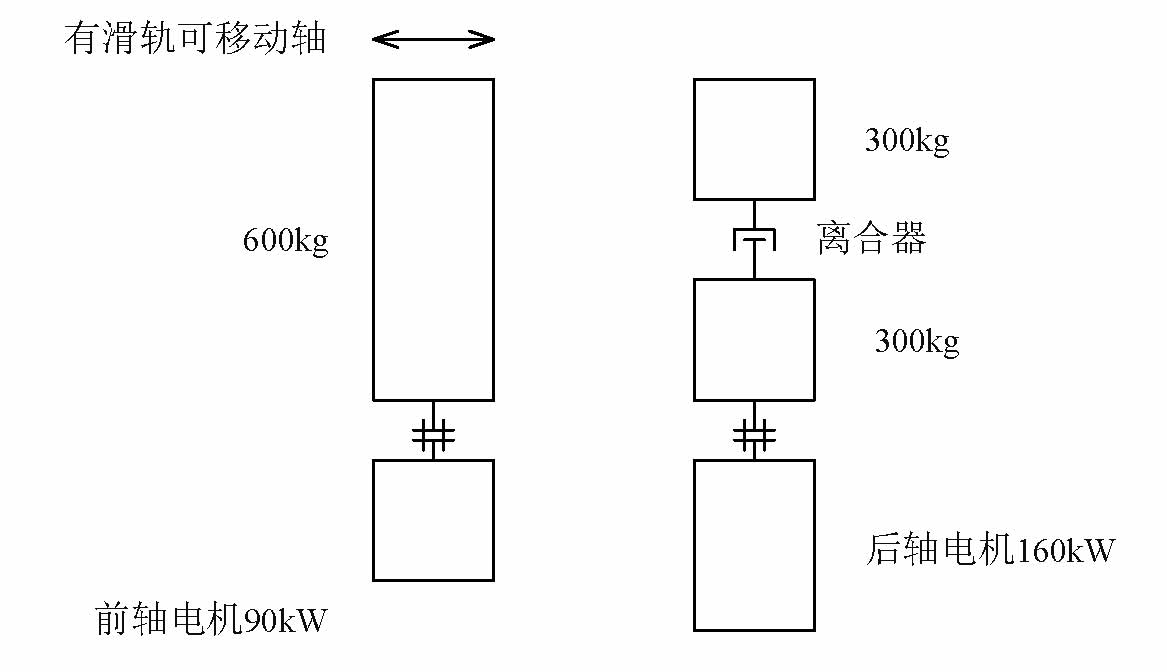
如上图示。两个电机分别带各自的转鼓运行。其中可移动轴的转鼓是一个当量质量600kg的转鼓;固定的转鼓分别是两个300kg的转鼓,并根据需要可以通过离合器接通或断开。变成300kg质量和600kg质量的两种状态。
可移动转鼓的驱动电机是3AC380V_90kW_8极;
固定转鼓的驱动电机是3AC380V_160kW_8极。
项目要求这两个转鼓可以实现实时的速度同步跟踪。
系统的拓扑结构:
01_CU320-2PN
02_MM电机驱动模块_160kW重载_带SMC30编码器模块
03_PM240-2电机驱动模块_90kW重载_SMC30编码器模块
04_SLM_250kW整流回馈单元
因为这个工艺对跟踪的电机速度控制要求比较特殊,所以参数调节确定后,其速度控制只能用于同步跟踪,不能与其它的速度控制共用。因此,同步跟踪工艺,是自己搭了一个速度控制调节器。作为同步跟踪专用。
基本方法如下:
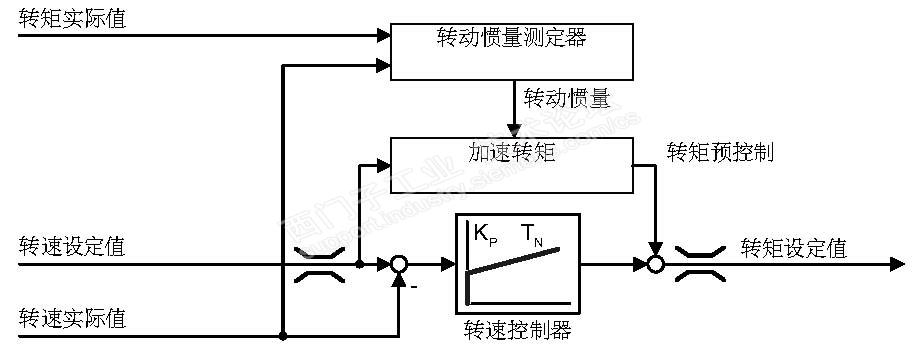
如上图示。自建工艺控制分三个部分,其一是PI调节器,其二是被跟踪轴系的转动惯性计算,其三是被跟踪轴系的加速度生成。在其跟踪过程,被跟踪轴的转速实际值作为工艺调节器的设定值,跟踪轴的转速实际值作为工艺调节器的反馈值。被跟踪轴惯性与加速度作为调节器的前馈补偿。由此完成了整个实时同步跟踪控制。
通过trace录波,两个轴互相跟踪,均能按照被跟踪轴的转速轨迹运行。并且完美重合。
90kW电机跟踪160kW电机的波形
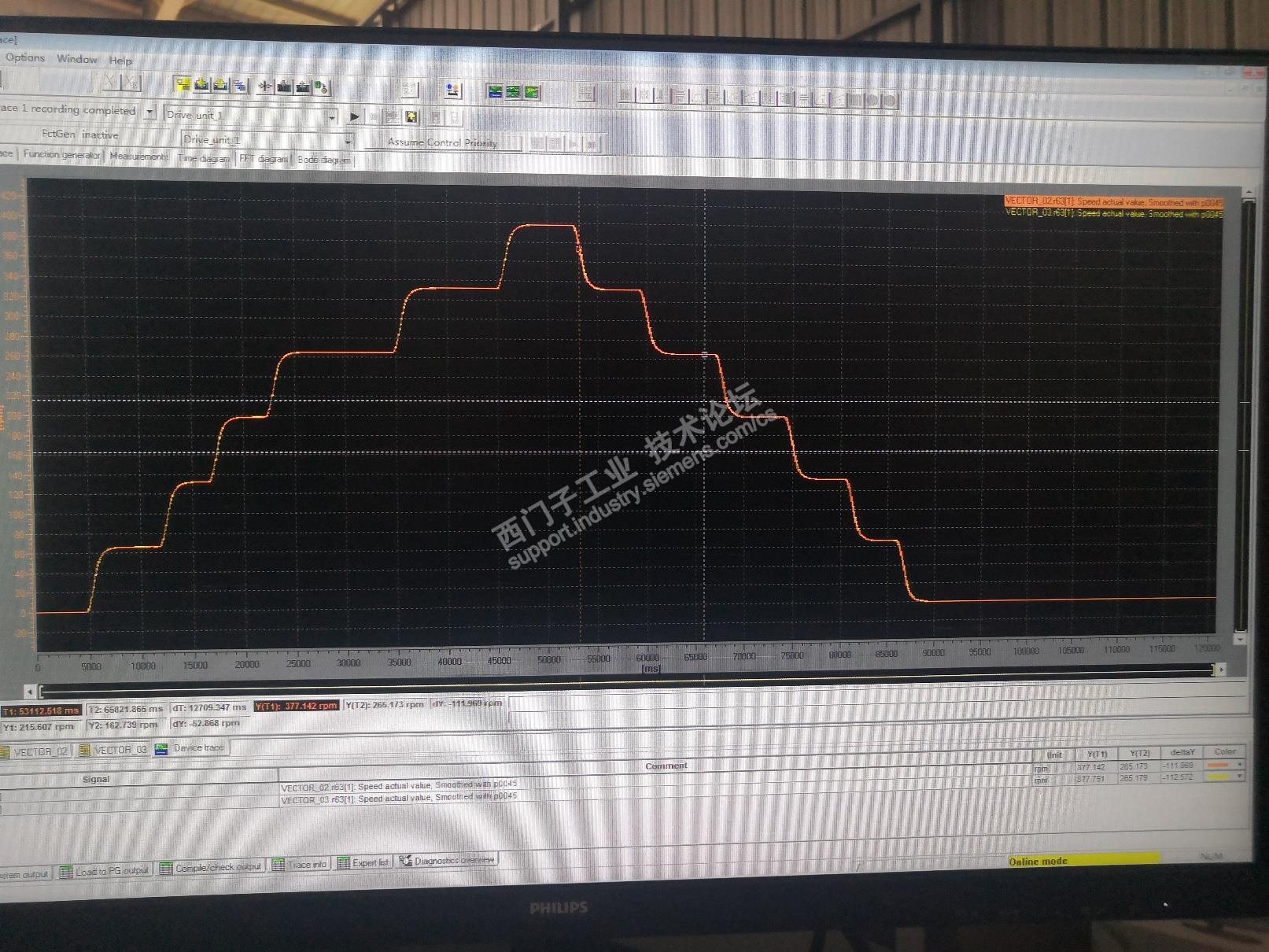
由此,满足了项目需求。
参考文献:西门子S120功能手册,270页至273页,速度前馈与参考模型。










 技术支持
技术支持 AI小西
AI小西
 风驰卡
风驰卡 产品入门
产品入门 在线产品选型
在线产品选型 售后登记和质保查询
售后登记和质保查询

 备件商城
备件商城 ASP工程师验证
ASP工程师验证 ASP公司证书验证
ASP公司证书验证 售后服务常见问题
售后服务常见问题 首页
首页 售前文档(样本、宣传册等)
售前文档(样本、宣传册等)  售后文档(FAQ、手册等)
售后文档(FAQ、手册等)
 首页
首页 立即开通1847会员
立即开通1847会员 标准机型应用中心
标准机型应用中心
 首页
首页 教室培训课
教室培训课 取证训练营
取证训练营 在线自学课
在线自学课 认证证书查询
认证证书查询 培训伙伴验证
培训伙伴验证 首页
首页 最新发帖
最新发帖 精华帖
精华帖 发新帖
发新帖 已解决问题
已解决问题 精华常见问题
精华常见问题 官方商城
官方商城 西门子中国
西门子中国


 钻石
钻石



 本版热门话题
本版热门话题

 相关推荐
相关推荐 相关帖子推荐
相关帖子推荐












