


















 西门子商城
西门子商城 西门子中国
西门子中国

 钻石
钻石

 本版热门话题
本版热门话题

 相关推荐
相关推荐 相关帖子推荐
相关帖子推荐
恭喜,你发布的帖子


发布于 2023-09-30 09:24:27
23楼
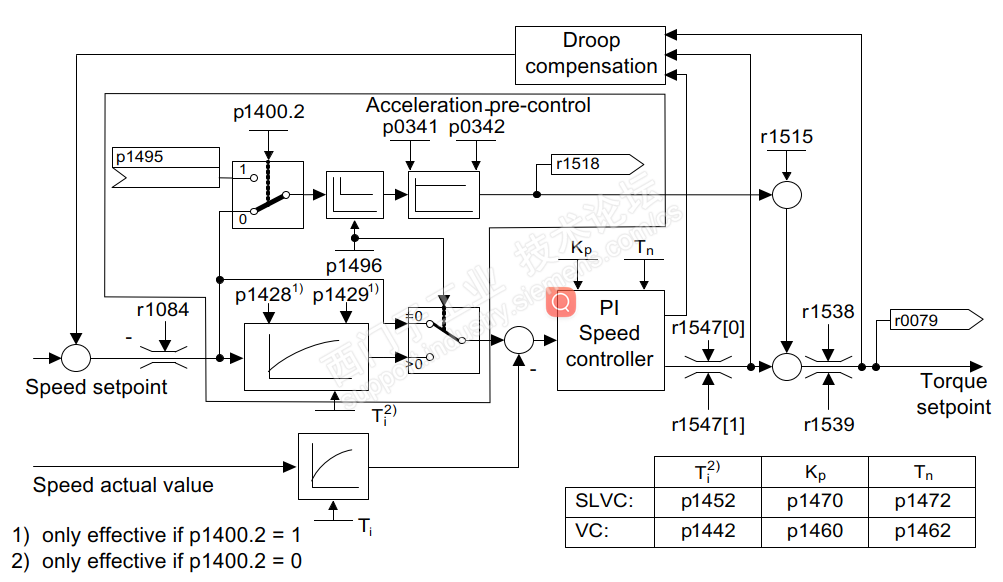
参考模型(Reference model)主要用来抑制转速超调的,基本原理就是将设定转速与实际转速的差值延迟后再送入转速调节器的积分控制器。这个模型就3个参数(p1433、p1434、p1435),类似一阶惯性环节,就延时作用。让P控制器先行参与转速调节,I控制器滞后参与调节。VC用的少,因为不容易得出模型的三个参数,频域分析可以得出来。
你说的“转矩前馈转速给定值平衡(对称化)”应该是指加速预控的平衡滤波器(p1428、p1429),目的在使用加速预控时(p1496>0)防止速度控制器对注入的扭矩设定值起作用。意思是在加速预控起作用的初期,阻止转速差信号进入转速调节器,这样转速调节器就没有输出了。这样就限制了转速控制器输出的转矩值叠加到了加速预控的转矩上面去了。说白了就是要让加速预控力矩与转速调节器输出的力矩分开作用,别同时作用。
加速预控的目的是为了增加系统响应,大惯量系统可以增加稳定性,也可以减少转速超调,减轻转速调节器负担。这个比较常用的功能。
加速预控与参考模型不能同时使用!
讲的很好。能够看懂这个,就是懂传动控制的惯性补偿原理了。
也巧了,上述所说的参考模型(反馈通道的微分校正)与加速度预控(设定值通道的微分校正),这两种方法我最近都用到了。而且都获得了很好满足应用需求的效果。
请填写推广理由:

分享
只看
楼主










