G120的SLVC,它的转速是算的,不是实测的。那它算的准吗?有了问题怎么办?比如说,正在运行中的G120传动系统,出现问题(故障)一个使能禁止,算的转速显示值就没了。咋办呢?
下面,就以一个G120_SLVC实际的系统作为例子,看看它算的转速实际值和实际出了问题该怎么办吧。
系统配置:
电机:2极_15kW三相异步电机
额定转速:3000rpm
最高转速:6000rpm
驱动装置:PM240-2重载15kW
控制器:CU240E-2PN
CU参数转速设定值与实际值显示r62;r63:
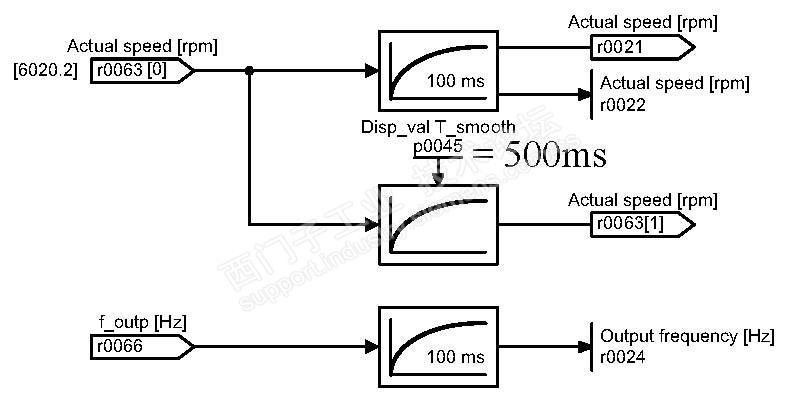
如上图示,r63.1通过滤波P45 = 500ms,获取一个比较平滑的效果。有利于监控的视觉舒适性;
G120对无编码器反馈转速的传动控制系统,自带了一个监控和保护的功能。就是可以通过一个开关量的端子,把安装在电机输出旋转轴上的接近开关信号输入进装置,获取实际旋转轴的状态进行监控和保护。
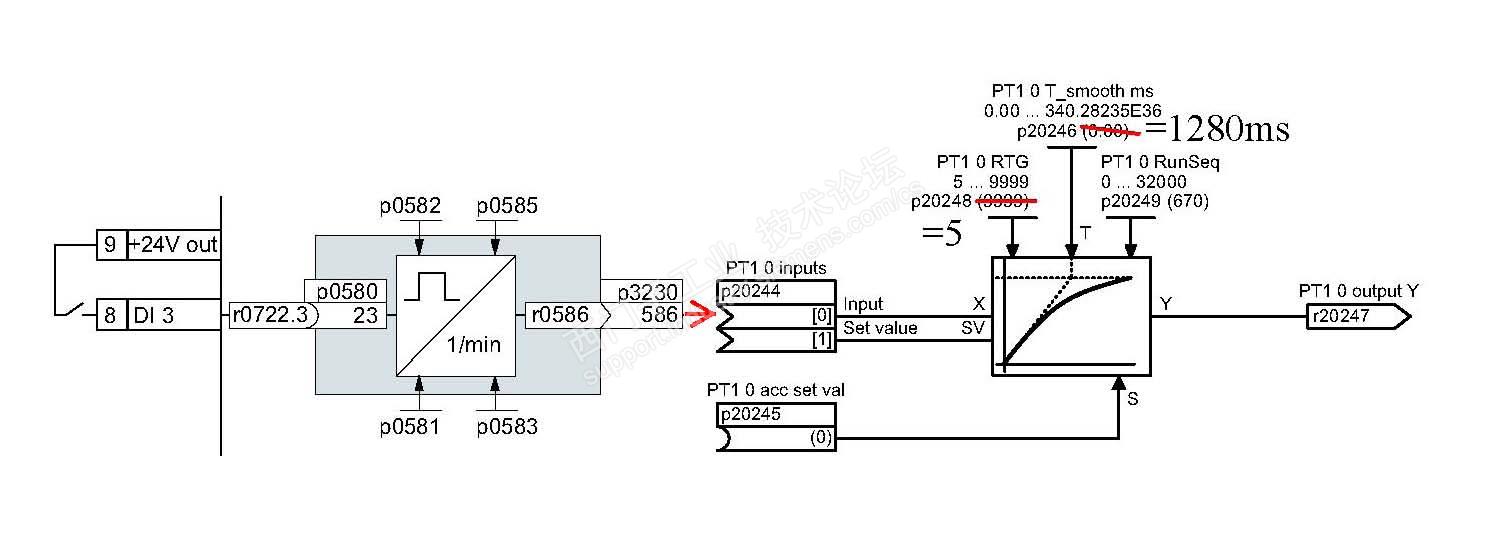
如上图示。r586就是实测转速信号,但为了使信号具有平滑效果,同样用一个滤波自由功能块,做了一个1280ms的滤波。使其能够显示稳定。作为稳态需求,这样的平滑作用是必要的。
有了这个外部检测的转速信号,即使有故障保护激活,其实际转速也是有效显示实际值的。而且在正常状态,这个检测转速信号与装置内部计算的转速实际值,可以实时进行比较,如果超差,上位计算机通过PN通讯,系统也会知道并做出相应的提示和处理。
通过实际对
转速设定值:r62
速度实际值:r63.1(滤波后)
实测速度实际值:r20247(滤波后)
做一个trace。波形状态如下:
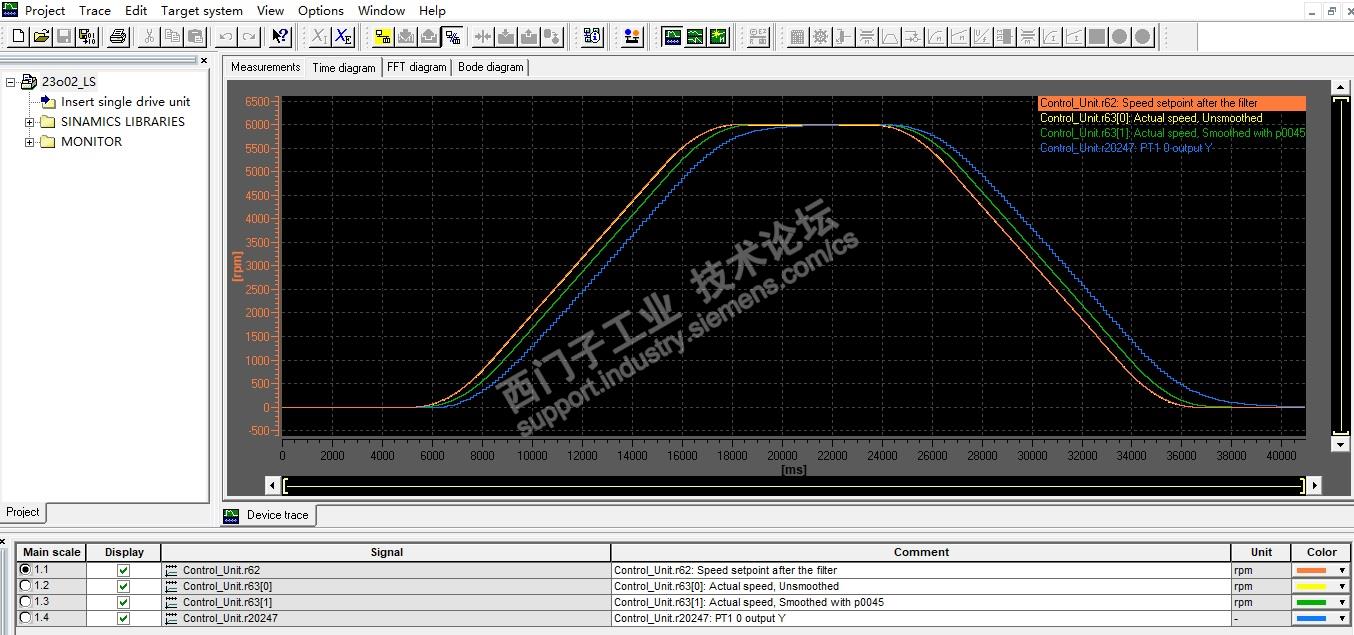
有波形可见:
第一,算的转速r63.1和实测的转速r20247在达到最高转速的稳态时,此时已经是弱磁控制状态了。没有误差。算得准。
第二,实测的转速每周2个脉冲,这个波形就像小楼梯一样的变化,不是很连续的那种。说明它的时间扫描周期不是很小。最小128ms。不过针对稳态检测需求,这个也是够用了。



















 西门子商城
西门子商城 西门子中国
西门子中国


 钻石
钻石



 本版热门话题
本版热门话题

 相关推荐
相关推荐 相关帖子推荐
相关帖子推荐












