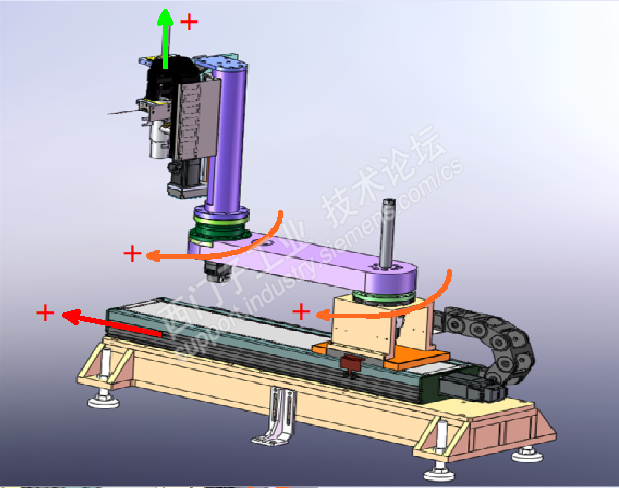
如下图,公司项目为了节省用四个V90设计了一个四轴机器人,其中垂直轴只是用于产品夹紧换型所以不参与讨论,实际就是一个三轴机器人系统。plc采用的是1515T来控制。
项目实际是有五个一样的机器人并排摆放,用来搬运物料。动作流程是5个机器人同步运行到左侧抓取物料后底下模组退回后同步摆动到右侧,底下模组再前进到位放置产品后退回,依次循环进行间歇搬运。
现在我编写完程序后发现按我的思路机器人运行时同步性不够,显得流畅度欠缺。运行过程中往往会出现同位置的轴有的先到达后等待不动的状态。由于机器人摆放不够精准,所以不同机器人的各个轴在运行时抓取位置有细微差别,按实际输出的大概会有10mm和10°左右的偏差,所以不能简单的由轴的同步控制来实现。
现在我的编程思路可以实现设备伪同步运行但是观感比较差,因为plc选择是T系列PLC超过了我的预期,所以我想把PLC的性能再榨取一下,所以把现在的状态发出来供大家讨论一下,同时听听各位大佬的意见优化一下程序。















 官方商城-正品备件
官方商城-正品备件
 DIOMIS
DIOMIS 西门子中国
西门子中国


 黄金
黄金


 本版热门话题
本版热门话题

 相关推荐
相关推荐 相关帖子推荐
相关帖子推荐












