本单位属于线缆行业设备制造商。不论放线和收线都是采用的位移传感器。电机驱动使用西门子变频器G120,传感器见下图,
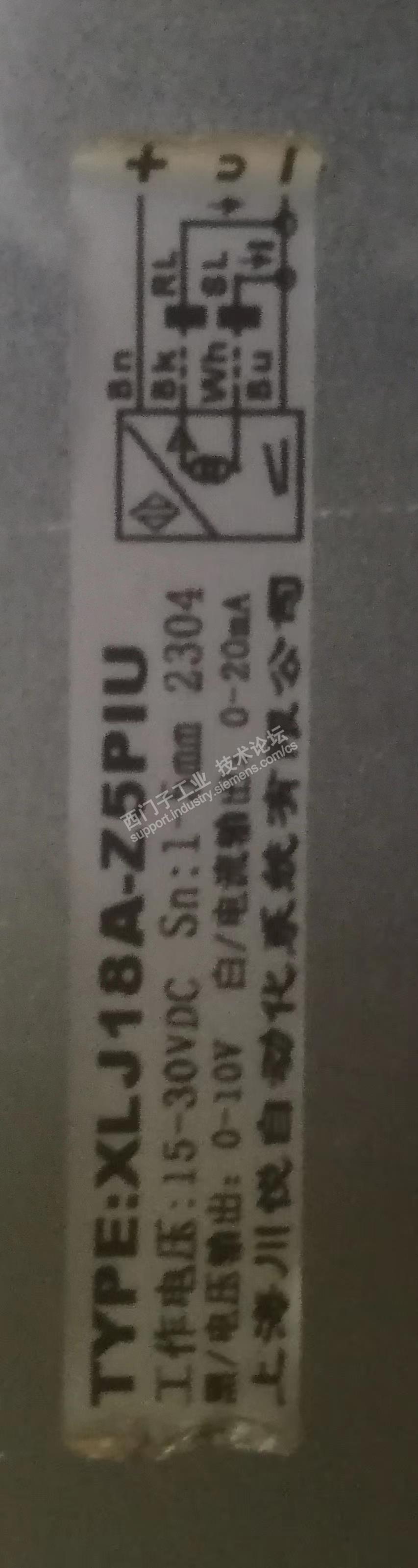
可见参数工作电压15-30VDC SN:1-5mm(额定检测范围),黑线/电压输出0-10V,白线/电流输出0-20mA,检测体直径18mm,棕色线电源正,蓝色线电源负。含义是这个直径18毫米的位移传感器检测面在与被检测物距(可以是弧形面)离等效于不大于1毫米时,电压型输出电压是0伏,电流型输出是0毫安,当等效于5毫米时输出是10伏和20毫安。
机械上采用偏心凸轮块提供机械部件移动的位置变化,传感器通过感应与偏心凸轮块的相对位置给出对应电压或者电流。
查看参数手册p0756选择 模拟输入类型,p0757-p0758-p0759-p0760用于修改。用 p0756 修改了模拟量输入的类型后,变频器会自动调整模拟量输入的定标。线性的定标 曲线由两个点(p0757, p0758)和(p0759, p0760)确定。
我单位需要张力控制的正反转所以设置为P0756=0,即确定输入信号是单极电压输入 0 V … +10 V,然后P0757=0(此时单位是伏),P0758=-100%,P0759=10(此时单位是伏),P0760=100%,P2200=1使能PID控制。什么意思呢,0伏输入和10伏输入分别对应电机最大转速且运转方向是相反的。。。,5伏时对应PID速度控制是无转速,中点电压即5伏。
那么设置P0757=1,P0759=9。此时中点电压还是5伏,对于电机控制效果呢还是无转速(PID算法输出为0)。
那么设置P0757=3,P0759=9。此时中点电压是6伏,对于电机控制效果呢在5.5伏时无转速(PID算法输出为0)。
那么设置P0757=4,P0759=6。此时中点电压是5伏,对于电机控制效果呢在5伏时无转速(PID算法输出为0)。
那么对于都是5伏的中点电压,参数范围小对电机PID控制的效果是什么影响呢(其它相关参数不变的情况下)?机械上的相同变化,电机速度变化趋势越明显,即响应会更加快一点;
那么对于P0757=3,P0759=9。此时中点电压是6伏,和0-10伏比较对电机PID控制的效果是什么影响呢(其它相关参数不变的情况下)?机械上的相同变化,电机速度变化趋势越明显,即响应会更加快一点,因为电压变化区间是6伏,对应的速度变化还是正负最大速度哦。但是有没有推断出一个现象,是机械上位移区间本身没有变小,但是电器上控制需要的位移区间可以缩小了。。。,下班一会了,。。。下篇再续 机械位移空间和电器标定之间的关联。















 官方商城-正品备件
官方商城-正品备件
 DIOMIS
DIOMIS 西门子中国
西门子中国



 钻石
钻石


 本版热门话题
本版热门话题

 相关推荐
相关推荐 相关帖子推荐
相关帖子推荐












