









 技术支持
技术支持 AI小西
AI小西
 风驰卡
风驰卡 产品入门
产品入门 在线产品选型
在线产品选型 售后登记和质保查询
售后登记和质保查询

 备件商城
备件商城 ASP工程师验证
ASP工程师验证 ASP公司证书验证
ASP公司证书验证 售后服务常见问题
售后服务常见问题 首页
首页 售前文档(样本、宣传册等)
售前文档(样本、宣传册等)  售后文档(FAQ、手册等)
售后文档(FAQ、手册等)
 首页
首页 立即开通1847会员
立即开通1847会员 标准机型应用中心
标准机型应用中心
 首页
首页 教室培训课
教室培训课 取证训练营
取证训练营 在线自学课
在线自学课 认证证书查询
认证证书查询 培训伙伴验证
培训伙伴验证 首页
首页 最新发帖
最新发帖 精华帖
精华帖 发新帖
发新帖 已解决问题
已解决问题 精华常见问题
精华常见问题 官方商城
官方商城 西门子中国
西门子中国

 普通
普通

 本版热门话题
本版热门话题

 相关推荐
相关推荐 相关帖子推荐
相关帖子推荐
恭喜,你发布的帖子


发布于 2023-12-27 17:36:49
22楼
300案例他扫描60度,精度0.5度,采集了240个点云。50cm一个点云,目标是人阈值20cm,车辆阈值5米。
你用的激光雷达量程,在你的报文示例里面是100米(16#10270000)。
300案例中他多用常量编程,你应该都用变量。否则现场调试,从HMI更改管脚参数与模式,以匹配调试场景,就不便利,效率太低。程序架构的效率也太低。
在基本摸索出场景特点和适宜参数验证的基础上,适当降低精度,提高处理速度和存储效率。
用博图SCL和UDT,比300编程手段方便多了。所有的nCode都定义成UDT,就不用定义常量了。你这项目主要是用简单UDT构成复合型UDT的大量定义和运用。
通讯倒没啥特殊,下帖对你可能有用。https://www.ad.siemens.com.cn/club/bbs/Post_1862263_50_0_0_0_1_0__0.html
另外,你这雷达价格是多少?如果有适配OpanHarmony的国产激光雷达,那上位开发效率高太多。可以手机遥控和同步,但那是嵌入式又一套东西了。最近这两天,长成手机样子的OpanHarmony开发板已经问世了。
这项目没有根本上的难度,就是工作量大,大量阅读吃透雷达用法,反复调试。
那个300案例也是比较简单化,一些小场景细节的顺滑与健壮都没弄。这种项目非常值得迭代。你的公铁交叉路口的人车场景要比他的复杂,就看你是否想做到丝滑的程度。值得深度玩,好事儿。点云对比的偏差计算,你可以有自己的套路。
工控人都说卷。不想和别人卷,就得做别人没做过和不去做的。越难越好。
宝东大佬,我现在已经可以收和发心跳报文了,而且也发送了测量开始的报文,也接收到了测量所得数据的报文,但是对于报文的处理还不清楚。报文格式我都已经全部弄清楚了,就是处理这一块儿的编程很头疼,如何写出像这个厂家给的cpp中的解析函数呢?原本cpp中20多个解析函数,我只需要用到区域监测信号和坐标数据,从而来判断列车、人、障碍物的有或无,但是这些解析函数的编写确实很头疼,学习LAD和SCL时也没有目的性,所以想厚颜问一问宝东大佬,有没有相关或者类似的处理报文的程序例程供小弟学习一下,比如机器人,或者别的检测手段在PLC上实现报文处理的,万分感谢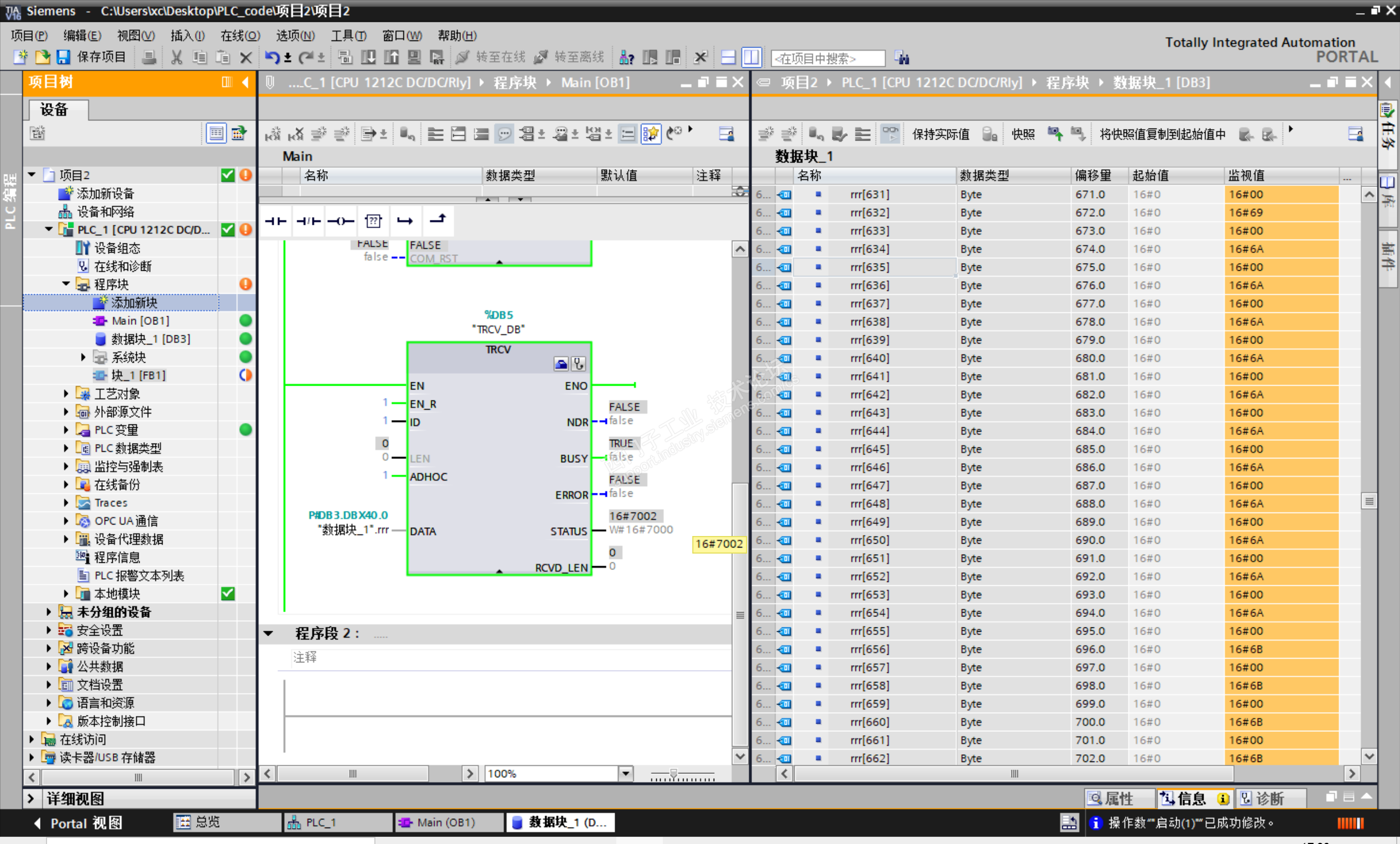

请填写推广理由:

分享
只看
楼主










