


















 西门子商城
西门子商城 西门子中国
西门子中国

 普通
普通

 本版热门话题
本版热门话题

 相关推荐
相关推荐 相关帖子推荐
相关帖子推荐
恭喜,你发布的帖子


发布于 2024-03-21 10:17:00
27楼
不应该是PLC中的PID算法问题,应是PID参数设置的不适合的问题。也就是PID的动态相应太快了。引起被控温度连续较大幅度或大幅度震荡波动,且不能逐渐进入稳态。
1)相对的【动态相应速度】太快:永久连续大幅度震荡,甚至永远不会进入稳态;
2)相对的【动态相应速度】较快:较大幅度震荡,幅度会逐渐减小,震荡次数远大于3次后,才基本稳定;
3)相对的【动态相应速度】合适:震荡1至3次后稳定;
4)相对的【动态相应速度】略慢:无震荡,直接较慢的进入稳定状态;
5)相对的【动态相应速度】太慢:无震荡,被控反馈值变化时,调节反应太迟钝;
加热控制,存在较大的热惰性,温度检测滞后。如:可使用【慢速】PID的参数设置运行,待系统基本稳定后 ,再【启动】自整定。
1、CPU运行中,打开【PID 整定控制面板】;

2、打开【PID 整定控制面板】中的【高级选项】。将 动态响应 设置为【慢速】,
一旦您完成了选择,可以单击“确定”(OK) 按钮返回 PID 整定控制面板的主画面。

3、PID调节控制面板 界面:“更新 CPU”(Update CPU) 按钮: 可以使用“更新 CPU”(Update CPU) 按钮将所显示的“增益”、“积分时间”和“微分时间”值传送到被监视的 PID 回路的 CPU中;
4、启动PID运行,观察自整定面板曲线图,待系统基本稳定后 ,【启动】PID的自整定功能。自整定完成后,也可以根据情况微调PID参数。
5、再次【更新CPU】。然后,保存程序。
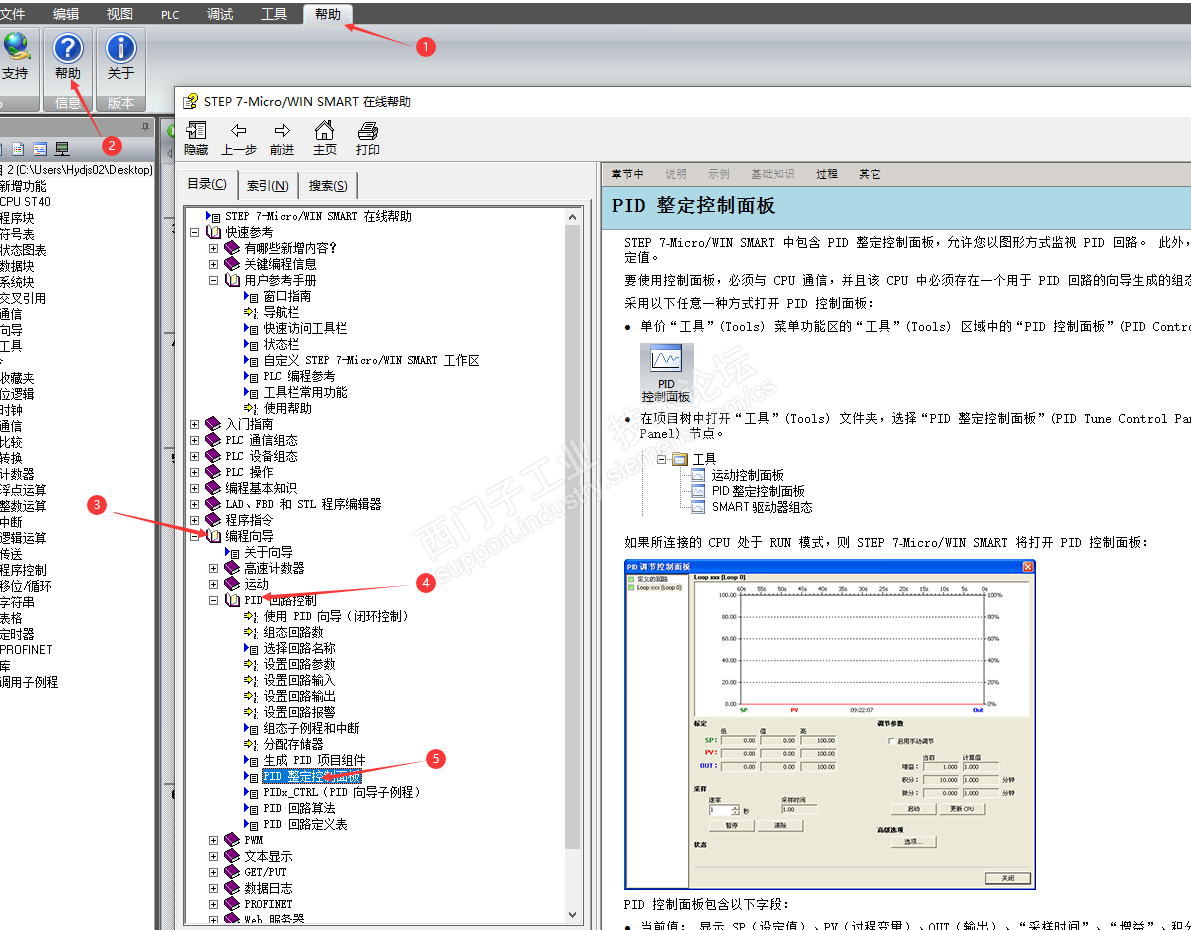
详细请参考 在线帮助中的【PID整定控制面板】部分。
打开【PID整定控制面板】相关帮助的方法之一,参考步骤:
2)
请填写推广理由:

分享
只看
楼主










