


















 西门子商城
西门子商城 西门子中国
西门子中国

 普通
普通

 本版热门话题
本版热门话题

 相关推荐
相关推荐 相关帖子推荐
相关帖子推荐
恭喜,你发布的帖子


发布于 2024-03-25 18:19:53
2楼
这种设计是错误的呀,原点不能在极限位置。
按现在的状态,只能靠近原点的时候减速,慢慢靠近。实际上原点应该是单向的原点,即返回原点后要过冲一点,然后再反向动作,感应到原点信号作为原点。否则你来回多次运动累计误差会越来越大。
原点不能在极限位置
-------------------------------------
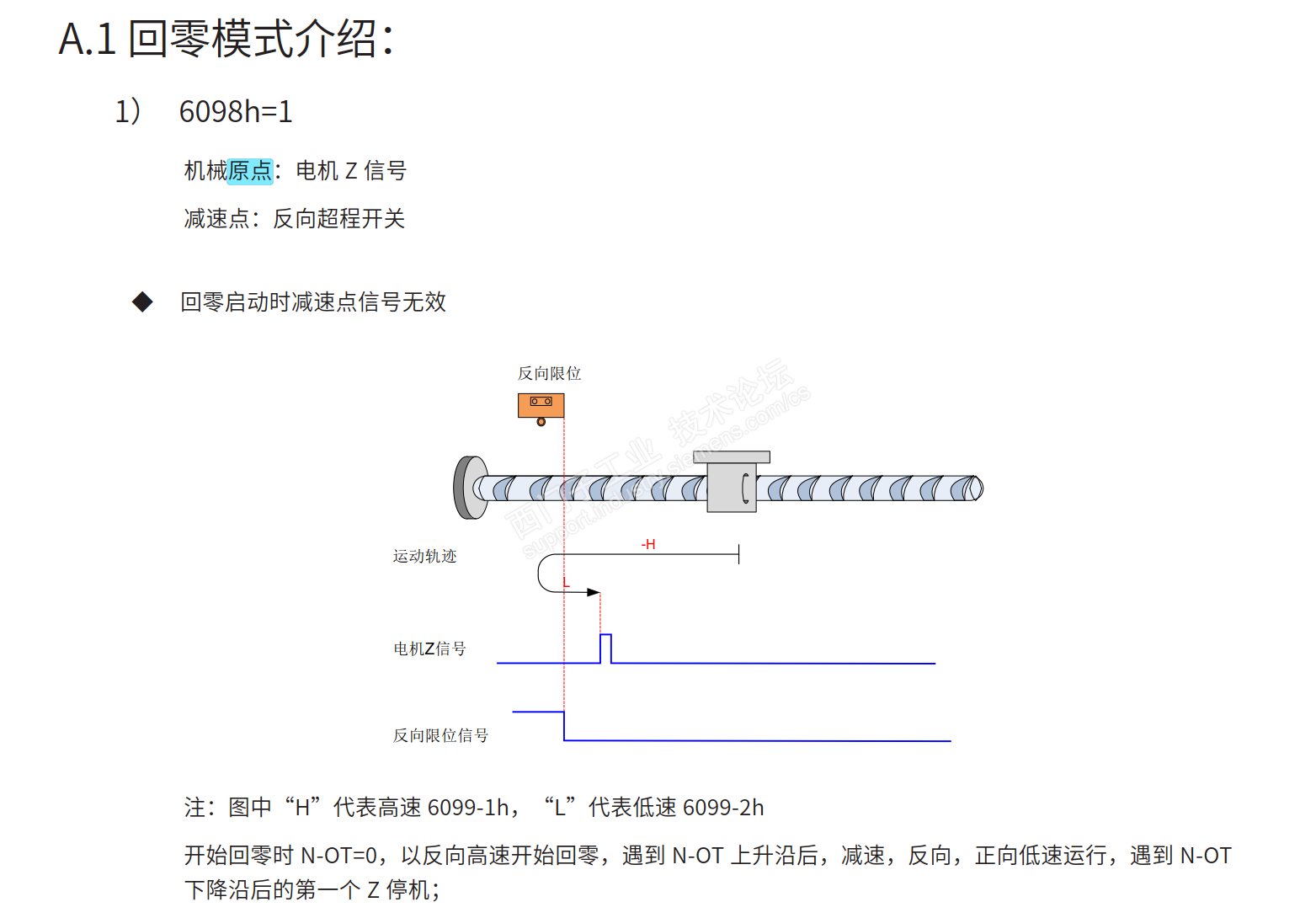
还别说,汇川 SV660N 默认的回原方式是 “减速点:负极限,原点:Z信号”
当时我就惊呆了,怎么负极限位减速并完成回零了。。。
请填写推广理由:

分享
只看
楼主










