


















 西门子商城
西门子商城 西门子中国
西门子中国

 钻石
钻石


 本版热门话题
本版热门话题

 相关推荐
相关推荐 相关帖子推荐
相关帖子推荐
恭喜,你发布的帖子


发布于 2024-03-26 11:22:55
11楼
我理解:
1、BiCo的意思是使用位控制值的传递。如同我们编程使用的FBD(功能块编程)是一样的。如同LOGO编程,只是将一个块的输出连接到另一个块的输入。(手动编程是将每一个块的输入填入另一个块的输出;图形编程只是连接线段而已。)
这里也是如此,BiCo互联就是你用的块输入填入那个信号源的参数号。
2、西门子驱动(包括直流驱动)使用了一套完整标准、规范化的控制程序。优点是:除了HMI(人机界面)外,不涉及任何实际物理参数。(如实际功率、电流、电压转矩等等。)
这就是:采用hex 4000=16384=100.0%=1用于一般速度、转矩、电流、电压等控制。
注意:它的数据类型是INT;表示范围是 +/-200%;精度是 1.6万分之一。足以满足绝大多数控制需求。
各种不同规格驱动器,具有不同的功率、电流、电压、转矩等边界参数;这些参数的实际值,由参数号2000 -2008来标定。标定的是100%的含义。例如:P2002=57A;则值16384=100%=57A
内部完全采用整数运算,仅在HMI界面转换成浮点数(包括调试软件中)。
如果理解了上述两点:那么就可以看懂功能图:下面是速度给定通道的功能图:
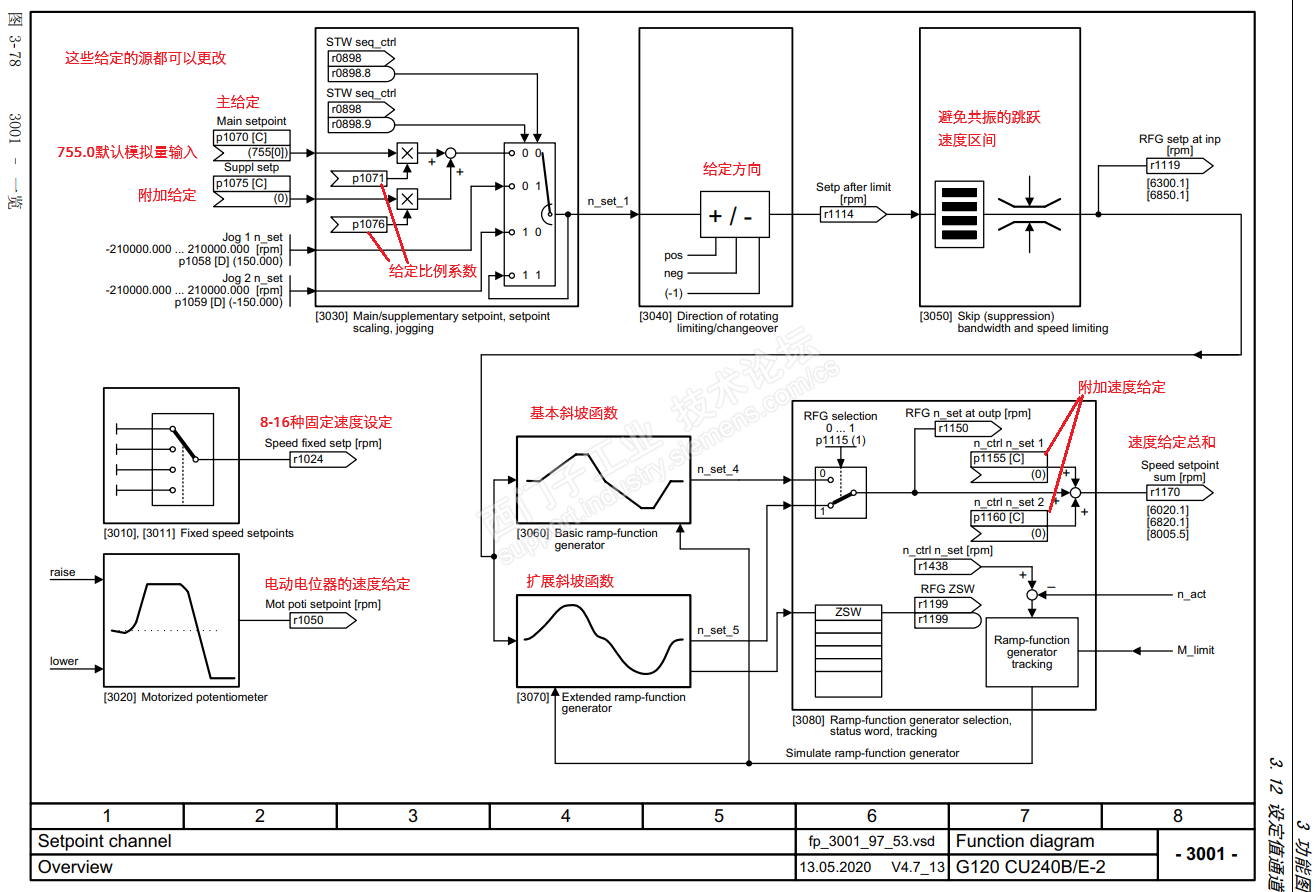
默认的主给定来自755.0(模拟量1信号源),当你选择报文给定后,它会改成2050.1来自报文PZD2;
在这里可以看到,它有附加给定;此外还有比例系数;也可以将给定送到斜坡函数之后。
(不推荐加入到斜坡函数之后,较大的变速、升速/降速,很容易引起过流。这些点,都是用于如转矩补偿等控制用的。)
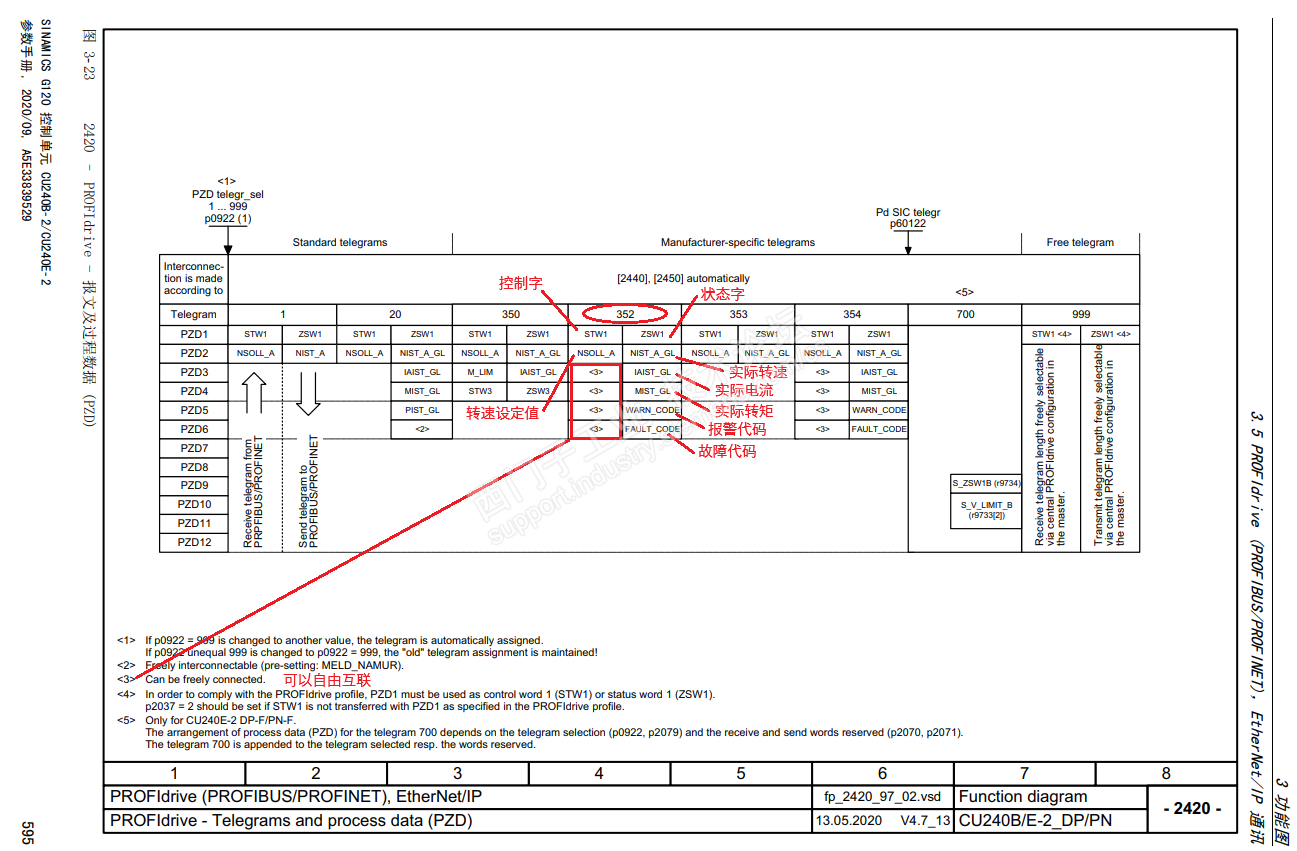
如何加入:速度控制,采用报文352即可,它留有4个可以自由互联的PZD。
注意,尽量使用PZD5,PZD6;因为PZD3、PZD4是可以位控的。
请填写推广理由:

分享
只看
楼主










