









 技术支持
技术支持 AI小西
AI小西
 风驰卡
风驰卡 产品入门
产品入门 在线产品选型
在线产品选型 售后登记和质保查询
售后登记和质保查询

 备件商城
备件商城 ASP工程师验证
ASP工程师验证 ASP公司证书验证
ASP公司证书验证 售后服务常见问题
售后服务常见问题 首页
首页 售前文档(样本、宣传册等)
售前文档(样本、宣传册等)  售后文档(FAQ、手册等)
售后文档(FAQ、手册等)
 首页
首页 立即开通1847会员
立即开通1847会员 标准机型应用中心
标准机型应用中心
 首页
首页 教室培训课
教室培训课 取证训练营
取证训练营 在线自学课
在线自学课 认证证书查询
认证证书查询 培训伙伴验证
培训伙伴验证 首页
首页 最新发帖
最新发帖 精华帖
精华帖 发新帖
发新帖 已解决问题
已解决问题 精华常见问题
精华常见问题 官方商城
官方商城 西门子中国
西门子中国

 普通
普通

 本版热门话题
本版热门话题

 相关推荐
相关推荐 相关帖子推荐
相关帖子推荐
恭喜,你发布的帖子


发布于 2024-03-26 12:03:44
14楼
我理解:
1、BiCo的意思是使用位控制值的传递。如同我们编程使用的FBD(功能块编程)是一样的。如同LOGO编程,只是将一个块的输出连接到另一个块的输入。(手动编程是将每一个块的输入填入另一个块的输出;图形编程只是连接线段而已。)
这里也是如此,BiCo互联就是你用的块输入填入那个信号源的参数号。
2、西门子驱动(包括直流驱动)使用了一套完整标准、规范化的控制程序。优点是:除了HMI(人机界面)外,不涉及任何实际物理参数。(如实际功率、电流、电压转矩等等。)
这就是:采用hex 4000=16384=100.0%=1用于一般速度、转矩、电流、电压等控制。
注意:它的数据类型是INT;表示范围是 +/-200%;精度是 1.6万分之一。足以满足绝大多数控制需求。
各种不同规格驱动器,具有不同的功率、电流、电压、转矩等边界参数;这些参数的实际值,由参数号2000 -2008来标定。标定的是100%的含义。例如:P2002=57A;则值16384=100%=57A
内部完全采用整数运算,仅在HMI界面转换成浮点数(包括调试软件中)。
如果理解了上述两点:那么就可以看懂功能图:下面是速度给定通道的功能图:
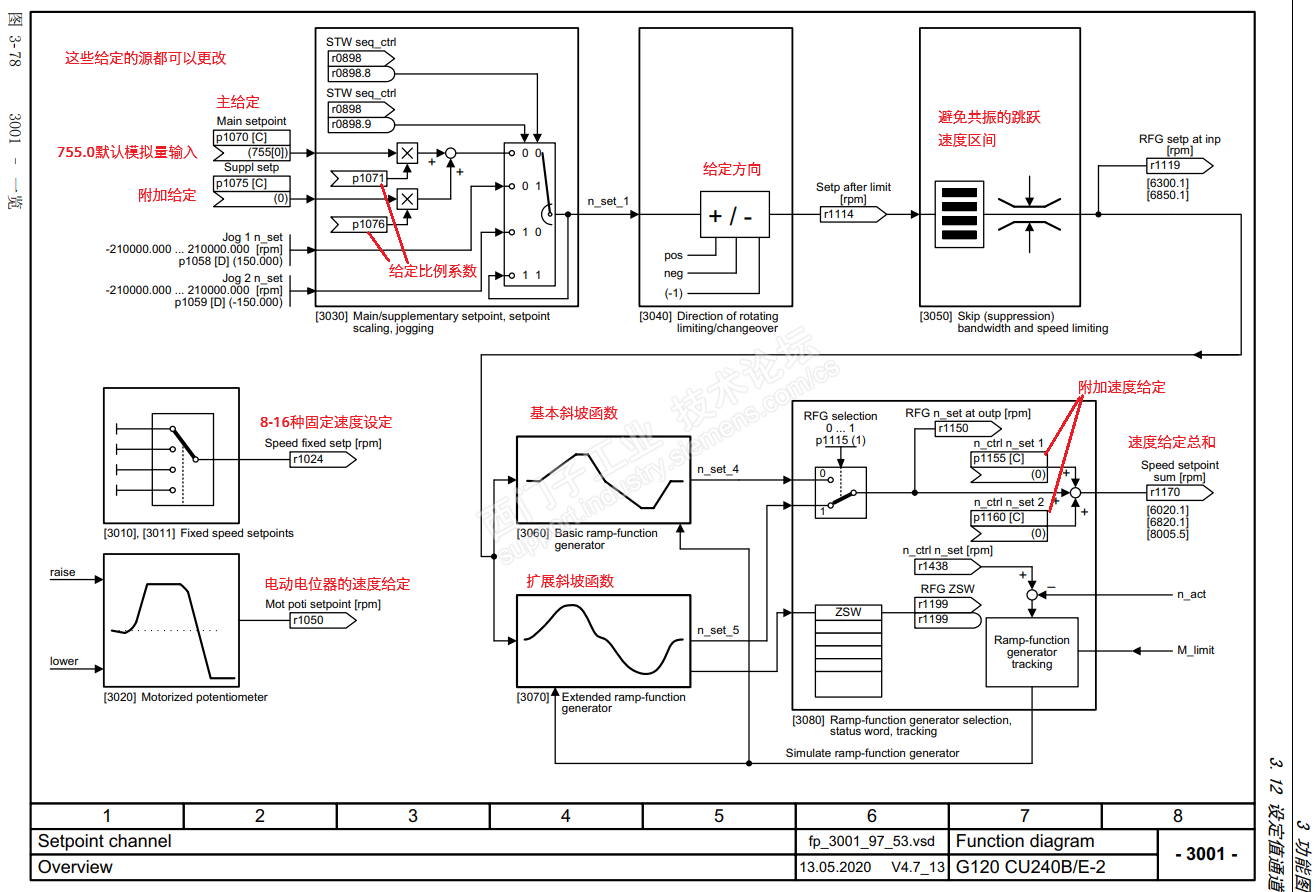
默认的主给定来自755.0(模拟量1信号源),当你选择报文给定后,它会改成2050.1来自报文PZD2;
在这里可以看到,它有附加给定;此外还有比例系数;也可以将给定送到斜坡函数之后。
(不推荐加入到斜坡函数之后,较大的变速、升速/降速,很容易引起过流。这些点,都是用于如转矩补偿等控制用的。)
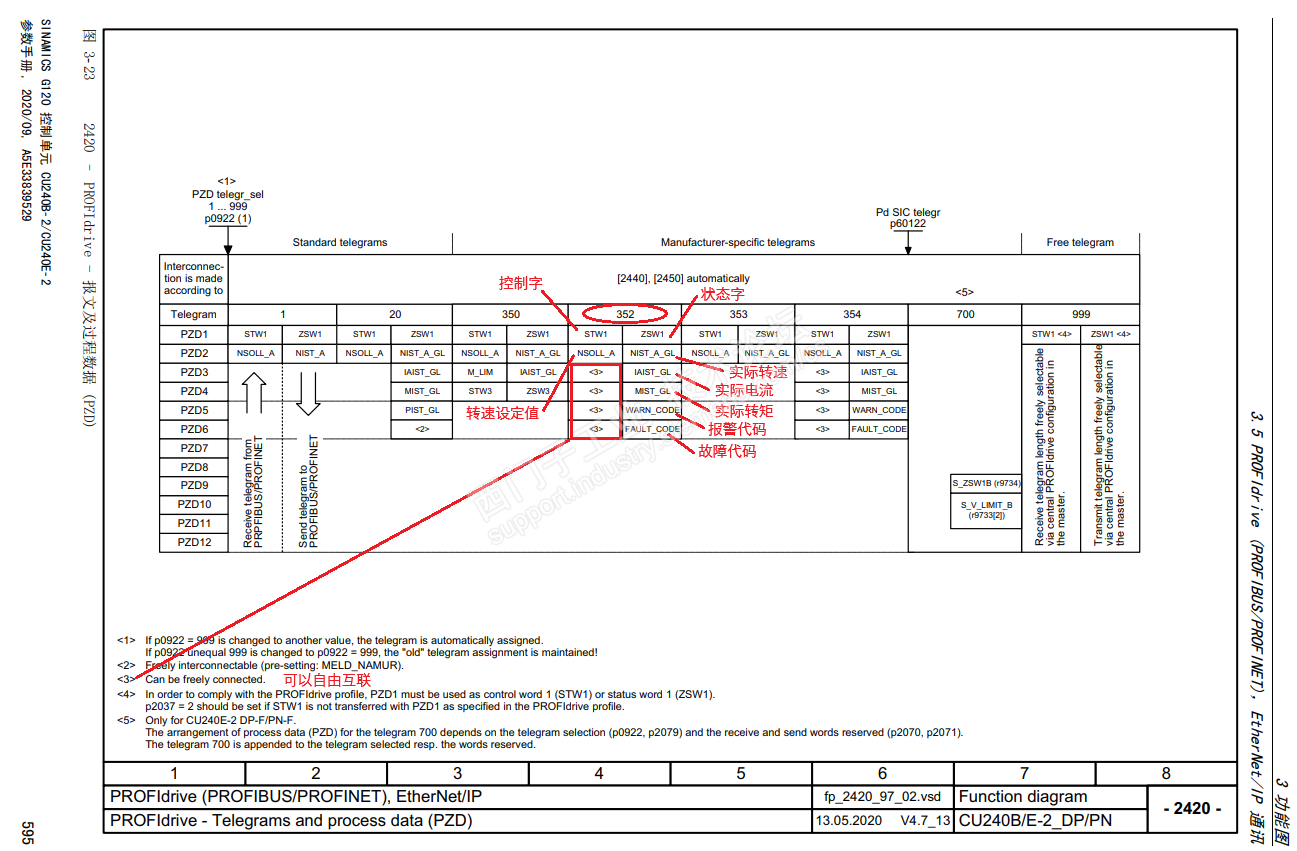
如何加入:速度控制,采用报文352即可,它留有4个可以自由互联的PZD。
注意,尽量使用PZD5,PZD6;因为PZD3、PZD4是可以位控的。
乐工!
非常感谢你的细心指导。
这里提到的
(不推荐加入到斜坡函数之后,较大的变速、升速/降速,很容易引起过流。这些点,都是用于如转矩补偿等控制用的。)
:::之前的其他家的变频器我们都是直接补偿到输出上(可以说算是老工艺了),这样可以快速响应算法的控制(我们为了避免发生上面提到的过载问题,我们把速度补偿值限制在比较小的范围内,比如最大补偿控制在5%以内)
如何加入:速度控制,采用报文352即可,它留有4个可以自由互联的PZD。
注意,尽量使用PZD5,PZD6;因为PZD3、PZD4是可以位控的。
:::乐工,这里还是有一点疑问,由于我没有使用过这个BICO功能,比如现在的报文=353,现在确定了P1155就是要BICO到PZD3上使用的参数,那么P1155是不是还有子参数可以设置明确关联到PZD3?还是在其它的参数对P1155 BICO到PZD3进行设置?
还请乐工指导!!
谢谢!
请填写推广理由:

分享
只看
楼主










