









 技术支持
技术支持 AI小西
AI小西
 风驰卡
风驰卡 产品入门
产品入门 在线产品选型
在线产品选型 售后登记和质保查询
售后登记和质保查询

 备件商城
备件商城 ASP工程师验证
ASP工程师验证 ASP公司证书验证
ASP公司证书验证 售后服务常见问题
售后服务常见问题 首页
首页 售前文档(样本、宣传册等)
售前文档(样本、宣传册等)  售后文档(FAQ、手册等)
售后文档(FAQ、手册等)
 首页
首页 立即开通1847会员
立即开通1847会员 首页
首页 教室培训课
教室培训课 取证训练营
取证训练营 在线自学课
在线自学课 认证证书查询
认证证书查询 培训伙伴验证
培训伙伴验证 首页
首页 最新发帖
最新发帖 精华帖
精华帖 发新帖
发新帖 已解决问题
已解决问题 精华常见问题
精华常见问题 运维工程师专区
运维工程师专区 官方商城
官方商城 西门子中国
西门子中国

 白金
白金

 本版热门话题
本版热门话题

 相关推荐
相关推荐 相关帖子推荐
相关帖子推荐
恭喜,你发布的帖子


发布于 2024-04-19 10:04:20
7楼
你该好好理解1楼说的!!!!!!!!!!!!!!!!!!
停车模式有多种主要实现方法是断使能,EnableAxis管脚即是使能,CancelTraversing和IntermediateStop 这两个停止的好处是停车不会触发轴报警. 他俩是有区别,你看看1楼说的.
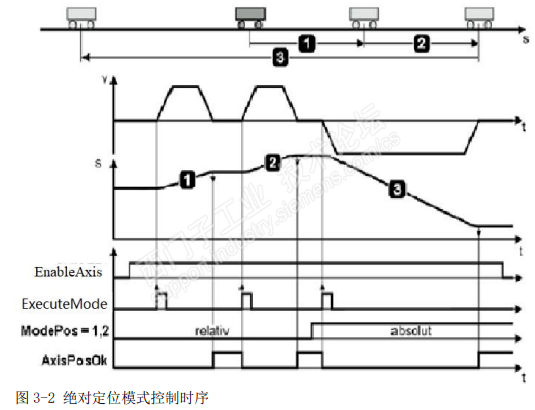
ExecuteMode 是启动任务的.(你打算叫轴什么时候、什么条件动就靠它) 这个在定位中是上升沿触发就启动了 ,不用一直触发 这个你要多看看(时序图),深刻理解(时序图).如下:
OverV设为0速度为0,你给电轴也不会动的.你不该在这上面做文章,这个适合调速.
你这是连续运行模式,碰到到位应该是暂停任务,(InternediateStop)管脚是负责暂停的. 你应该在这个上面多想想逻辑 .
请填写推广理由:

分享
只看
楼主









