









 技术支持
技术支持 AI小西
AI小西
 风驰卡
风驰卡 产品入门
产品入门 在线产品选型
在线产品选型 售后登记和质保查询
售后登记和质保查询

 备件商城
备件商城 ASP工程师验证
ASP工程师验证 ASP公司证书验证
ASP公司证书验证 售后服务常见问题
售后服务常见问题 首页
首页 售前文档(样本、宣传册等)
售前文档(样本、宣传册等)  售后文档(FAQ、手册等)
售后文档(FAQ、手册等)
 首页
首页 立即开通1847会员
立即开通1847会员 首页
首页 教室培训课
教室培训课 取证训练营
取证训练营 在线自学课
在线自学课 认证证书查询
认证证书查询 培训伙伴验证
培训伙伴验证 首页
首页 最新发帖
最新发帖 精华帖
精华帖 发新帖
发新帖 已解决问题
已解决问题 精华常见问题
精华常见问题 运维工程师专区
运维工程师专区 官方商城
官方商城 西门子中国
西门子中国

 黄金
黄金

 本版热门话题
本版热门话题

 相关推荐
相关推荐 相关帖子推荐
相关帖子推荐
恭喜,你发布的帖子


发布于 2024-06-18 13:03:56
7楼
回复3楼y版:
他这个系统是模拟传动变速箱吧?一个主驱模拟发动机,四个加载的电机模拟四个传动变速箱的输出?本身不是很难搞。关键是需要做瞬态测试?所以系统的动态特性要求高吧?
我质疑的是,楼主说用PID控制器解决了扭振?而他给出的PID调节器的D置0,等同于PI调节器?这里有两点:第一,扭振是传动难题,大家都在对其研究和解决。而解决方案更倾向于用陷波器的方法,对扭振的频率和振幅进行限制或削弱去解决。说用PID调节器解决扭振?简直是...。唉;第二,从图与文字描述来看,楼主的自相矛盾表明他对此问题的不严谨吧?
不管怎么说,一个精彩分享贴,不能像楼主这般不认真。这帖子也可以作为个另类的分享,让读者知道,搞传动专业的工作应该怎么做。
如K版所说,PID不能解决扭振,但是在我调试的这套系统中PID起着至关重要的因素,不可能完全消除扭振问题,只是通过投入主动控制让波动趋近于一个稳态,在此系统中,我的理解是电机输出端配置的为增速箱,也就是说电机调节10nm,在产品端调节1nm,所以能投入PID进行主动控制(个人见解)。
描述一下:在整个系统出现问题后,首先是机械整改,通过调整电机与增速箱之间的联轴器,联轴器的钢度从刚性调节成橡胶联轴器,想着让联轴器吸收扭振的能量,更换完成之后会有一些效果,特别是在1#2#加载电机中解耦起到关键性作用。
K版所说的D,是一种滞后性比大的负载,如温度是需要调节,在这套系统中也曾试过投入D,只要是加上D,系统就开始震荡。看看下面图是3#加载电机PI参数调整之后的曲线吧,蓝色是扭矩仪通过报文返回来的16384,扭矩仪量程50nm,没投入PID是大概波动3nm左右,投入PID后0.6nm左右,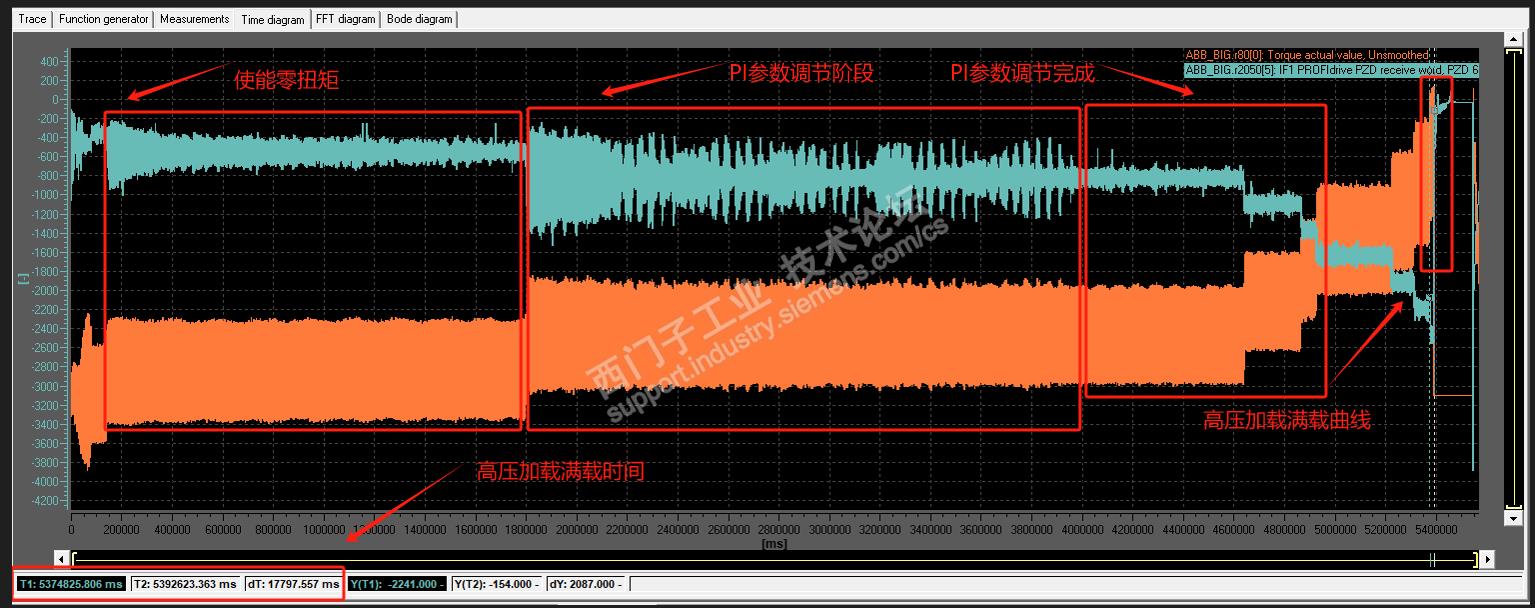
请填写推广理由:

分享
只看
楼主








