


















 西门子商城
西门子商城 西门子中国
西门子中国

 钻石
钻石

 本版热门话题
本版热门话题

 相关推荐
相关推荐 相关帖子推荐
相关帖子推荐
恭喜,你发布的帖子


发布于 2025-03-06 12:08:24
13楼
不是说了吗,告诉你录波不要用滤波后的,要用滤波前的信号。G120C就是r62_设定值;r63.0不带滤波的实际值。
另外你这个问题我认为是你的解题思路不对。不应该总是看着扭矩信号。包括起动转矩提升和动态转矩提升,这参数都是针对V/F的可能有效。当然,开环控制的这些补偿也不能说他们没用。但是,设定值和实际值之间存在滞后,我认为还是速调的参数很关键。
提示:你这个系统是升降机对吧?升降机的自身质量不是很小吧?你考虑过它的转动惯量吗?这个转动惯量在运行变化过程会产生一个附加动能。这是大学物理课都讲过的。牛顿第二定律。在传动控制里,这种动态的转动惯量因素,是需要考虑的。
希望你能看一看G120C的操作手册。其中对控制系统里的转动惯量观测器作用,有很详细的描述。你先看手册,再带着问题,用手册指导自己解决你的问题。我想你一定会大有收获。而且会对西家传动控制应用,从此产生浓厚的兴趣。

就是这个堆垛机,今天把它甩出来与大伙见个面。
昨天应该算是弄好了吧,把1610增加到135%,然后把1470 P增益由原来的3.53改为5。后面速度跟随效果就非常的好。
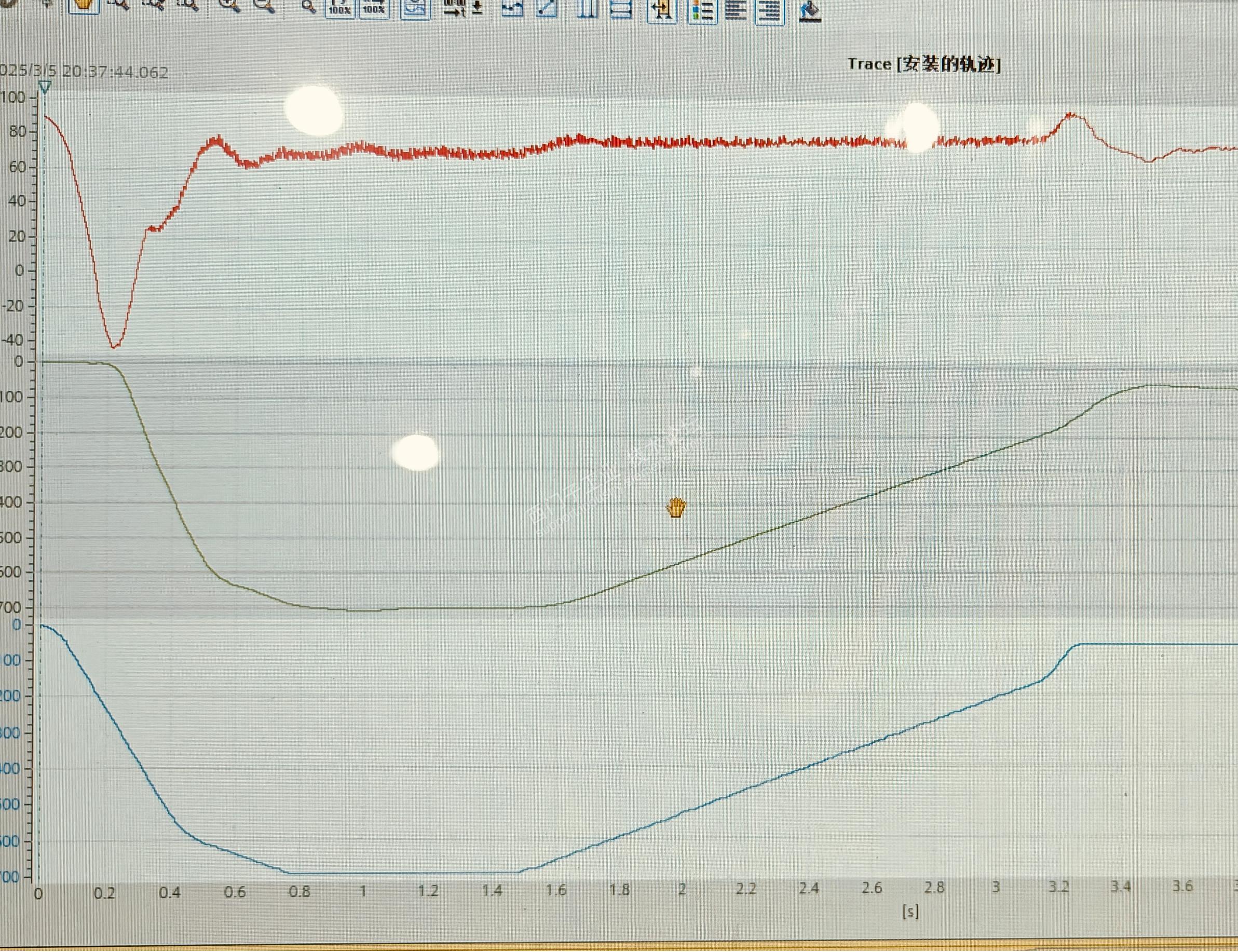
然后我把P增益又改为3.52,发现速度跟随又变差了,最后改为5.试了下重载,效果很好,已经不自由落体了,而且速度跟随也很好。上图就是重载的速度跟随效果。
 精华帖版主置评:这个分享很好。kdrjl
精华帖版主置评:这个分享很好。kdrjl
请填写推广理由:

分享
只看
楼主










