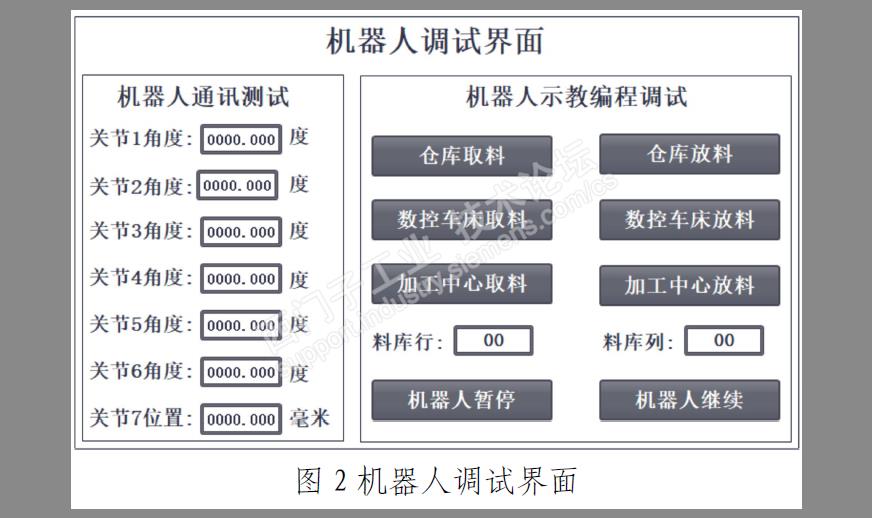
在机器人端改变关节轴和行走轴数据,能够在图2 所示的PLC 端的HMI 上同步显示。
IF "Robot.data"."40031_原点"=1 THEN
"MES_V3.1"."D041_机器人的状态(0停止、1故障、2运行)" :=0;
ELSE
"MES_V3.1"."D041_机器人的状态(0停止、1故障、2运行)" := 0;
END_IF;
"MES_V3.1".D042_机器人HOME位置确认(0不在、1在) := "Robot.data"."40031_原点";
"MES_V3.1"."D052_机器人动作流程完成信号(完成)" := "Robot.data"."40035_流程结束";
"MES_V3.1".D051_机械手关节7的坐标值 := "Robot.data"."40030_A7";
"MES_V3.1".D045_机械手关节1的坐标值 := "Robot.data"."40013";
"MES_V3.1".D046_机械手关节2的坐标值 := "Robot.data"."40014";
"MES_V3.1".D047_机械手关节3的坐标值 := "Robot.data"."40015";
"MES_V3.1".D048_机械手关节4的坐标值 := "Robot.data"."40016";
"MES_V3.1".D049_机械手关节5的坐标值 := "Robot.data"."40017";
"MES_V3.1".D050_机械手关节6的坐标值 := "Robot.data"."40018_A6";
"MES_V3.1"."D61_仓位1-16状态(0无料,1有料)" := "DI仓位工件状态1-16";
"MES_V3.1"."D62_仓位17-30状态(0无料,1有料)" := "DI仓位工件状态17-30";
"MES_V3.1"."D66.0_车床自动门关闭(0未关闭1关闭)" := NOT "DI车床防护门开门到位信号";
"MES_V3.1"."D66.1_车床自动门打开(0未打开1打开)" := "DI车床防护门开门到位信号";
"MES_V3.1"."D66.2_车床卡盘状态(0松开1夹紧)" := "DI车床卡盘夹紧信号";
"MES_V3.1"."D67.0_加工中心自动门关闭(0未关闭1关闭)" := NOT "DI加工中心防护门开门到位信号";
"MES_V3.1"."D67.1_加工中心自动门打开(0未打开1关闭)" := "DI加工中心防护门开门到位信号";
"MES_V3.1"."D67.2_加工中心卡盘状态(0松开1夹紧)" := "DI加工中心平口钳夹紧信号";










 技术支持
技术支持 AI小西
AI小西
 风驰卡
风驰卡 产品入门
产品入门 在线产品选型
在线产品选型 售后登记和质保查询
售后登记和质保查询

 备件商城
备件商城 ASP工程师验证
ASP工程师验证 ASP公司证书验证
ASP公司证书验证 售后服务常见问题
售后服务常见问题 首页
首页 售前文档(样本、宣传册等)
售前文档(样本、宣传册等)  售后文档(FAQ、手册等)
售后文档(FAQ、手册等)
 首页
首页 立即开通1847会员
立即开通1847会员 标准机型应用中心
标准机型应用中心
 首页
首页 教室培训课
教室培训课 取证训练营
取证训练营 在线自学课
在线自学课 认证证书查询
认证证书查询 培训伙伴验证
培训伙伴验证 首页
首页 最新发帖
最新发帖 精华帖
精华帖 发新帖
发新帖 已解决问题
已解决问题 精华常见问题
精华常见问题 官方商城
官方商城 西门子中国
西门子中国

 钻石
钻石


 本版热门话题
本版热门话题

 相关推荐
相关推荐 相关帖子推荐
相关帖子推荐












