
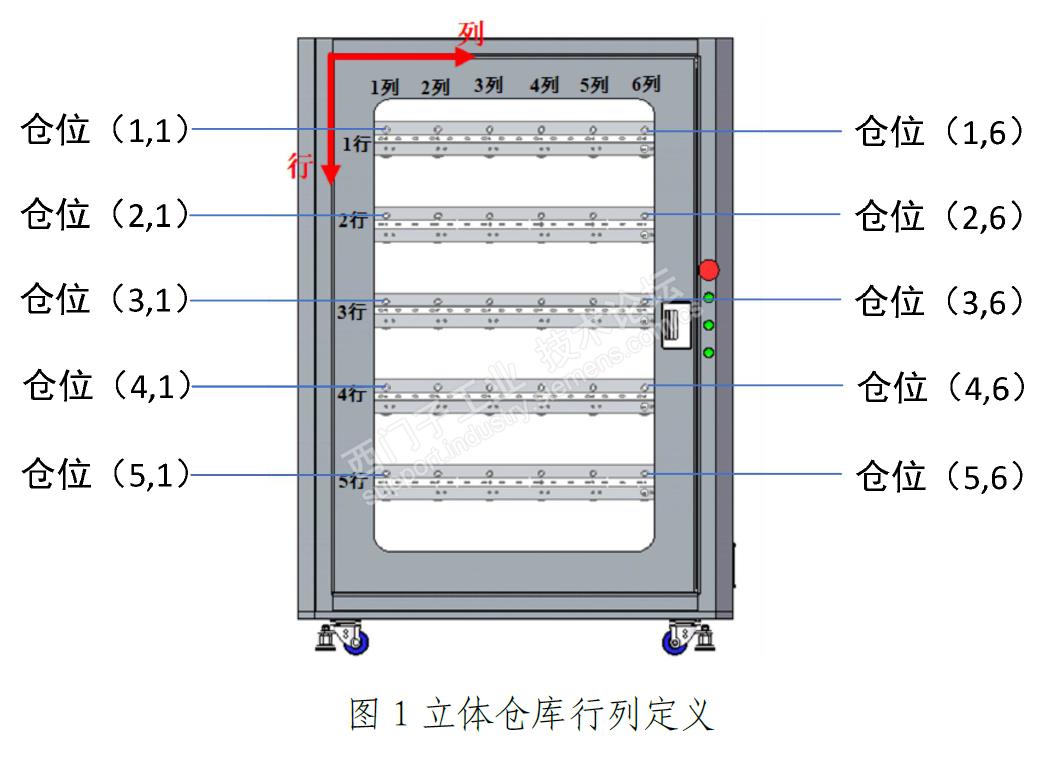
1)加工任务由 MES 下发,机器人自动立体仓库库位(3,2)中取工件坯料,加工流程状态按编码规则需写入到原仓位RFID 中,并在HMI 调试界面显示;
2)机器人取毛坯时应先读 RFID,后取毛坯;
3)加工完成后,工件需放入原仓位,RFID 写;
4)整体运行过程中,工业机器人与数控设备之间能协调、互锁运行,能够实现自动开关门、上下料及装夹等功能。
网络 1:控制命令初始化
0001 IF "HMI 命令初始化" THEN
0002 "robot_data"."40081_lOlIN(0)_机器人程序选择" := 0;
0003 "robot_data"."40082_lOlIN(1)_机器人行号" := 0;
0004 "robot_data"."40083_lOlIN(2)_机器人列号" := 0;
0005 "robot_data"."40084_lOlIN(3)_机器人控制车床信号(1 开始取放2 已夹紧3 已松开)" := 0;
0006 "robot_data"."40085_lOlIN(4)_机器人控制加工中心信号(1 开始取放2 已夹紧3 已松开)" := 0;
0007 "robot_data"."40086_lOlIN(5)_机器人控制RFID 信号(1 读写完成)" := 0;
0008 "robot_data"."40087_lOlIN(6)_机器人快换夹具号(1 小圆料2 大圆料3 方料)" := 0;
0009 "HMI 车床启动" := 0;
0010 "HMI 加工中心启动" := 0;
0011 "DO 车床启动信号" := 0;
0012 "DO 加工中心启动信号" := 0;
0013 "HMI 车床上料" := 0;
0014 "HMI 加工中心上料" := 0;
0015 "HMI 车床取料" := 0;
0016 "HMI 车床取料加工中心上料" := 0;
0017 "HMI 车床取料" := 0;
0018 "HMI 加工中心取料" := 0;
0019
0020
0021
0022 END_IF;
网络 2:车床上料 程序号 1
0001 IF "HMI 车床上料" THEN
0002 IF "DI 车床防护门开门到位信号" AND "DI 车床卡盘松开信号" THEN
0003 IF "robot_data"."40031_lOlOUT(0)_原点信号"=1 THEN
0004 "robot_data"."40081_lOlIN(0)_机器人程序选择" := 1;
0005 "robot_data"."40084_lOlIN(3)_机器人控制车床信号(1 开始取放2 已夹紧3 已松开)" := 1;
0006 "robot_data"."40082_lOlIN(1)_机器人行号" := "行号";
0007 "robot_data"."40083_lOlIN(2)_机器人列号" := "列号";
0008 "robot_data"."40087_lOlIN(6)_机器人快换夹具号(1 小圆料2 大圆料3 方料)" := "夹具号";
0009 END_IF;
0010 END_IF;
0011
0012 IF "robot_data"."40032_lOlOUT(1)_机器人请求车床信号(1 取放完成2 请求夹紧3 请求松开)"=2 THEN
0013 IF "DI 车床卡盘松开信号" THEN
0014 "DO 车床卡盘控制信号" := 1;
0015 END_IF;
0016 IF "DI 车床卡盘夹紧信号" THEN
0017 "DO 车床卡盘控制信号" := 0;
0018 "robot_data"."40084_lOlIN(3)_机器人控制车床信号(1 开始取放2 已夹紧3 已松开)" := 2;
0019 END_IF;
0020 END_IF;
0021 IF "robot_data"."40032_lOlOUT(1)_机器人请求车床信号(1 取放完成2 请求夹紧3 请求松开)" = 1 THEN
0022 "robot_data"."40084_lOlIN(3)_机器人控制车床信号(1 开始取放2 已夹紧3 已松开)" := 0;
0023
0024 END_IF;
0025 IF "robot_data"."40035_lOlOUT(4)" = 1 THEN
0026 "robot_data"."40081_lOlIN(0)_机器人程序选择" := 0;
0027 "robot_data"."40082_lOlIN(1)_机器人行号" := 0;
0028 "robot_data"."40083_lOlIN(2)_机器人列号" := 0;
0029 "robot_data"."40087_lOlIN(6)_机器人快换夹具号(1 小圆料2 大圆料3 方料)" := 0;
0030
0031 //"HMI 车床启动" := 1;
0032 "HMI 车床上料" := 0;
0033 END_IF;
0034
0035
0036 END_IF;
0037
网络 3:车床取料 程序号3
0001 IF "HMI 车床取料" THEN
0002 IF "DI 车床防护门开门到位信号" THEN
0003 IF "robot_data"."40031_lOlOUT(0)_原点信号" = 1 THEN
0004 "robot_data"."40081_lOlIN(0)_机器人程序选择" := 3;
0005 "robot_data"."40084_lOlIN(3)_机器人控制车床信号(1 开始取放2 已夹紧3 已松开)" := 1;
0006 "robot_data"."40082_lOlIN(1)_机器人行号" := "行号";
0007 "robot_data"."40083_lOlIN(2)_机器人列号" := "列号";
0008 "robot_data"."40087_lOlIN(6)_机器人快换夹具号(1 小圆料2 大圆料3 方料)" := "夹具号";
0009 END_IF;
0010 END_IF;
0011 IF "robot_data"."40032_lOlOUT(1)_机器人请求车床信号(1 取放完成2 请求夹紧3 请求松开)" = 3 THEN
0012 IF "DI 车床卡盘夹紧信号" THEN
0013 "DO 车床卡盘控制信号" := 1;
0014 END_IF;
0015 IF "DI 车床卡盘松开信号" THEN
0016 "DO 车床卡盘控制信号" := 0;
0017 "robot_data"."40084_lOlIN(3)_机器人控制车床信号(1 开始取放2 已夹紧3 已松开)" := 3;
0018 END_IF;
0019 END_IF;
0020 IF "robot_data"."40032_lOlOUT(1)_机器人请求车床信号(1 取放完成2 请求夹紧3 请求松开)" = 1 THEN
0021 "robot_data"."40084_lOlIN(3)_机器人控制车床信号(1 开始取放2 已夹紧3 已松开)" := 0;
0022 END_IF;
0023
0024 IF "robot_data"."40035_lOlOUT(4)" = 1 THEN //机器人流程结束信号OUT4
0025 "robot_data"."40081_lOlIN(0)_机器人程序选择" := 0;
0026
0027 "robot_data"."40082_lOlIN(1)_机器人行号" := 0;
0028 "robot_data"."40083_lOlIN(2)_机器人列号" := 0;
0029 "robot_data"."40087_lOlIN(6)_机器人快换夹具号(1 小圆料2 大圆料3 方料)" := 0;
0030
0031 "HMI 车床取料" := 0;
0032 END_IF;
0033
0034 END_IF;
网络 4:加工中心上料 程序号2
0001 IF "HMI 加工中心上料" THEN
0002 IF "DI 加工中心防护门开门到位信号" AND "DI 加工中心平口钳松开信号" THEN
0003 IF "robot_data"."40031_lOlOUT(0)_原点信号" = 1 THEN
0004 "robot_data"."40081_lOlIN(0)_机器人程序选择" := 2;
0005 "robot_data"."40085_lOlIN(4)_机器人控制加工中心信号(1 开始取放2 已夹紧3 已松开)" := 1;
0006 "robot_data"."40082_lOlIN(1)_机器人行号" := "行号";
0007 "robot_data"."40083_lOlIN(2)_机器人列号" := "列号";
0008 "robot_data"."40087_lOlIN(6)_机器人快换夹具号(1 小圆料2 大圆料3 方料)" := "夹具号";
0009 END_IF;
0010 END_IF;
0011 IF "robot_data"."40033_lOlOUT(2)_机器人请求加工中心信号(1 取放完成2 请求夹紧3 请求松开)" = 2 THEN
0012 IF "DI 加工中心平口钳松开信号" THEN
0013 "DO 加工中心平口钳控制" := 1;
0014 END_IF;
0015 IF "DI 加工中心平口钳夹紧信号" THEN
0016 "DO 加工中心平口钳控制" := 0;
0017 "robot_data"."40085_lOlIN(4)_机器人控制加工中心信号(1 开始取放2 已夹紧3 已松开)" := 2;
0018 END_IF;
0019 END_IF;
0020 IF "robot_data"."40033_lOlOUT(2)_机器人请求加工中心信号(1 取放完成2 请求夹紧3 请求松开)" = 1 THEN
0021 "robot_data"."40085_lOlIN(4)_机器人控制加工中心信号(1 开始取放2 已夹紧3 已松开)" := 0;
0022 END_IF;
0023 IF "robot_data"."40035_lOlOUT(4)"=1 THEN
0024 "robot_data"."40081_lOlIN(0)_机器人程序选择" := 0;
0025
0026 "robot_data"."40082_lOlIN(1)_机器人行号" := 0;
0027 "robot_data"."40083_lOlIN(2)_机器人列号" := 0;
0028 "robot_data"."40087_lOlIN(6)_机器人快换夹具号(1 小圆料2 大圆料3 方料)" := 0;
0029 //"HMI 加工中心启动" := 1;
0030 "HMI 加工中心上料" := 0;
0031 END_IF;
0032
0033
0034 END_IF;
0035
网络 5:加工中心取料程序号4
0001 IF "HMI 加工中心取料" THEN
0002 IF "DI 加工中心防护门开门到位信号" THEN
0003 IF "robot_data"."40031_lOlOUT(0)_原点信号" = 1 THEN
0004 "robot_data"."40081_lOlIN(0)_机器人程序选择" := 4;
0005 "robot_data"."40085_lOlIN(4)_机器人控制加工中心信号(1 开始取放2 已夹紧3 已松开)" := 1;
0006 "robot_data"."40082_lOlIN(1)_机器人行号" := "行号";
0007 "robot_data"."40083_lOlIN(2)_机器人列号" := "列号";
0008 "robot_data"."40087_lOlIN(6)_机器人快换夹具号(1 小圆料2 大圆料3 方料)" := "夹具号";
0009 END_IF;
0010 END_IF;
0011 IF "robot_data"."40033_lOlOUT(2)_机器人请求加工中心信号(1 取放完成2 请求夹紧3 请求松开)" = 3 THEN
0012 IF "DI 加工中心平口钳夹紧信号" THEN
0013 "DO 加工中心平口钳控制" := 1;
0014 END_IF;
0015 IF "DI 加工中心平口钳松开信号" THEN
0016 "DO 加工中心平口钳控制" := 0;
0017 "robot_data"."40085_lOlIN(4)_机器人控制加工中心信号(1 开始取放2 已夹紧3 已松开)" := 3;
0018 END_IF;
0019 END_IF;
0020 IF "robot_data"."40033_lOlOUT(2)_机器人请求加工中心信号(1 取放完成2 请求夹紧3 请求松开)" = 1 THEN
0021 "robot_data"."40085_lOlIN(4)_机器人控制加工中心信号(1 开始取放2 已夹紧3 已松开)" := 0;
0022 END_IF;
0023
0024 IF "robot_data"."40035_lOlOUT(4)"=1 THEN
0025 "robot_data"."40081_lOlIN(0)_机器人程序选择" := 0;
0026
0027 "robot_data"."40082_lOlIN(1)_机器人行号" := 0;
0028 "robot_data"."40083_lOlIN(2)_机器人列号" := 0;
0029 "robot_data"."40087_lOlIN(6)_机器人快换夹具号(1 小圆料2 大圆料3 方料)" := 0;
0030
0031 "HMI 加工中心取料" := 0;
0032 END_IF;
0033
0034 END_IF;
网络 6:车床取料加工中心上料
0001 "R_TRIG_DB_2"(CLK:="HMI 车床取料加工中心上料");
0002 IF "R_TRIG_DB_2".Q THEN
0003 "hmi_count9" := 1;
0004 END_IF;
0005 IF "HMI 车床取料加工中心上料" THEN
0006
0007 CASE "hmi_count9" OF
0008 1:
0009 IF "DI 车床防护门开门到位信号" (*AND "DI 加工中心防护门开门到位信号"*) AND "DI 车床卡盘夹紧信号"(* AND "DI 加工中心平口钳松
开信号"*) THEN
0010 IF "robot_data"."40031_lOlOUT(0)_原点信号" = 1 THEN
0011 "robot_data"."40081_lOlIN(0)_机器人程序选择" := 9;
0012 "robot_data"."40084_lOlIN(3)_机器人控制车床信号(1 开始取放2 已夹紧3 已松开)" := 1;
0013 // "robot_data"."40085_lOlIN(4)_机器人控制加工中心信号(1 开始取放2 已夹紧3 已松开)" := 1;
0014 "robot_data"."40082_lOlIN(1)_机器人行号" := "行号";
0015 "robot_data"."40083_lOlIN(2)_机器人列号" := "列号";
0016 "robot_data"."40087_lOlIN(6)_机器人快换夹具号(1 小圆料2 大圆料3 方料)" := "夹具号";
0017 "hmi_count9" := 2;
0018 END_IF;
0019 END_IF;
0020 2:
0021 IF "robot_data"."40032_lOlOUT(1)_机器人请求车床信号(1 取放完成2 请求夹紧3 请求松开)" = 3 THEN
0022 IF "DI 车床卡盘夹紧信号" THEN
0023 "DO 车床卡盘控制信号" := 1;
0024 END_IF;
0025 IF "DI 车床卡盘松开信号" THEN
0026 "DO 车床卡盘控制信号" := 0;
0027 "robot_data"."40084_lOlIN(3)_机器人控制车床信号(1 开始取放2 已夹紧3 已松开)" := 3;
0028 "hmi_count9" := 3;
0029 END_IF;
0030 END_IF;
0031 3:
0032 IF "robot_data"."40032_lOlOUT(1)_机器人请求车床信号(1 取放完成2 请求夹紧3 请求松开)" = 1 THEN
0033 "robot_data"."40084_lOlIN(3)_机器人控制车床信号(1 开始取放2 已夹紧3 已松开)" := 0;
0034 "hmi_count9" := 4;
0035 END_IF;
0036 4:
0037 IF "DI 加工中心防护门开门到位信号" AND "DI 加工中心平口钳松开信号" THEN
0038 // IF "robot_data"."40031_lOlOUT(0)_原点信号" = 1 THEN
0039 "robot_data"."40081_lOlIN(0)_机器人程序选择" := 9;
0040 // "robot_data"."40084_lOlIN(3)_机器人控制车床信号(1 开始取放2 已夹紧3 已松开)" := 1;
0041 "robot_data"."40085_lOlIN(4)_机器人控制加工中心信号(1 开始取放2 已夹紧3 已松开)" := 1;
0042 "robot_data"."40082_lOlIN(1)_机器人行号" := "行号";
0043 "robot_data"."40083_lOlIN(2)_机器人列号" := "列号";
0044 "robot_data"."40087_lOlIN(6)_机器人快换夹具号(1 小圆料2 大圆料3 方料)" := "夹具号";
0045 "hmi_count9" := 5;
0046 // END_IF;
0047 END_IF;
0048 5:
0049 IF "robot_data"."40033_lOlOUT(2)_机器人请求加工中心信号(1 取放完成2 请求夹紧3 请求松开)" = 2 THEN
0050 IF "DI 加工中心平口钳松开信号" THEN
0051 "DO 加工中心平口钳控制" := 1;
0052 END_IF;
0053 IF "DI 加工中心平口钳夹紧信号" THEN
0054 "DO 加工中心平口钳控制" := 0;
0055 "robot_data"."40085_lOlIN(4)_机器人控制加工中心信号(1 开始取放2 已夹紧3 已松开)" := 2;
0056 "hmi_count9" := 6;










 技术支持
技术支持 AI小西
AI小西
 风驰卡
风驰卡 产品入门
产品入门 在线产品选型
在线产品选型 售后登记和质保查询
售后登记和质保查询

 备件商城
备件商城 ASP工程师验证
ASP工程师验证 ASP公司证书验证
ASP公司证书验证 售后服务常见问题
售后服务常见问题 首页
首页 售前文档(样本、宣传册等)
售前文档(样本、宣传册等)  售后文档(FAQ、手册等)
售后文档(FAQ、手册等)
 首页
首页 立即开通1847会员
立即开通1847会员 首页
首页 教室培训课
教室培训课 取证训练营
取证训练营 在线自学课
在线自学课 认证证书查询
认证证书查询 培训伙伴验证
培训伙伴验证 首页
首页 最新发帖
最新发帖 精华帖
精华帖 发新帖
发新帖 已解决问题
已解决问题 精华常见问题
精华常见问题 运维工程师专区
运维工程师专区 官方商城
官方商城 西门子中国
西门子中国

 钻石
钻石


 本版热门话题
本版热门话题

 相关推荐
相关推荐 相关帖子推荐
相关帖子推荐










