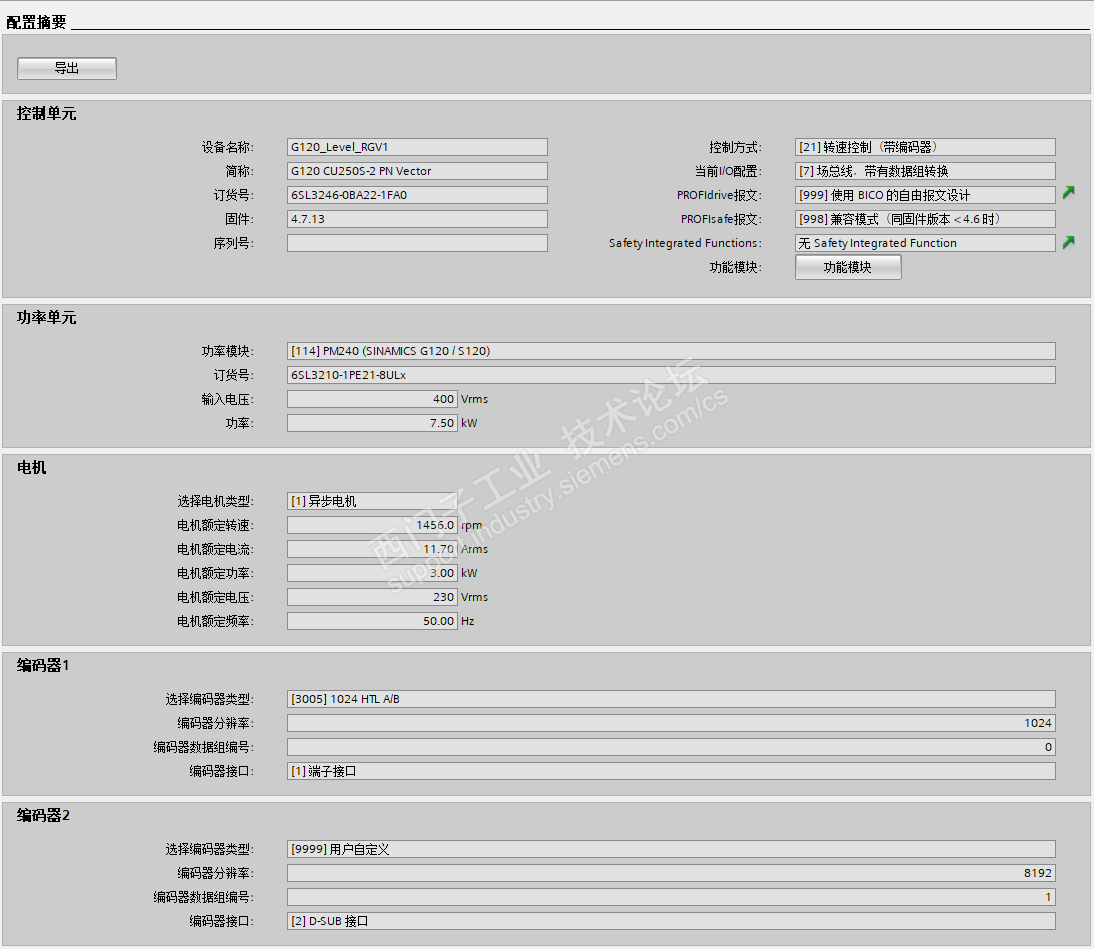
水平移动异步电机
G120 CU250S 双闭环控制方案
发现问题过程:
在调试面板使用绝对位置以较大速度运行时,出现跟随误差过大故障。
F1帮助显示
位置设定值和位置实际值的差值(跟随差动态模式,r2563)大于公差(p2546)。
- 1.超出驱动的转矩或加速能力。
- 2.位置测量系统出错。
- 3.编码器电缆中断。
- 4.位置控制方向不对。
- 5.机械装置卡死。
- 6.运行速度过高或位置设定值差值过大。
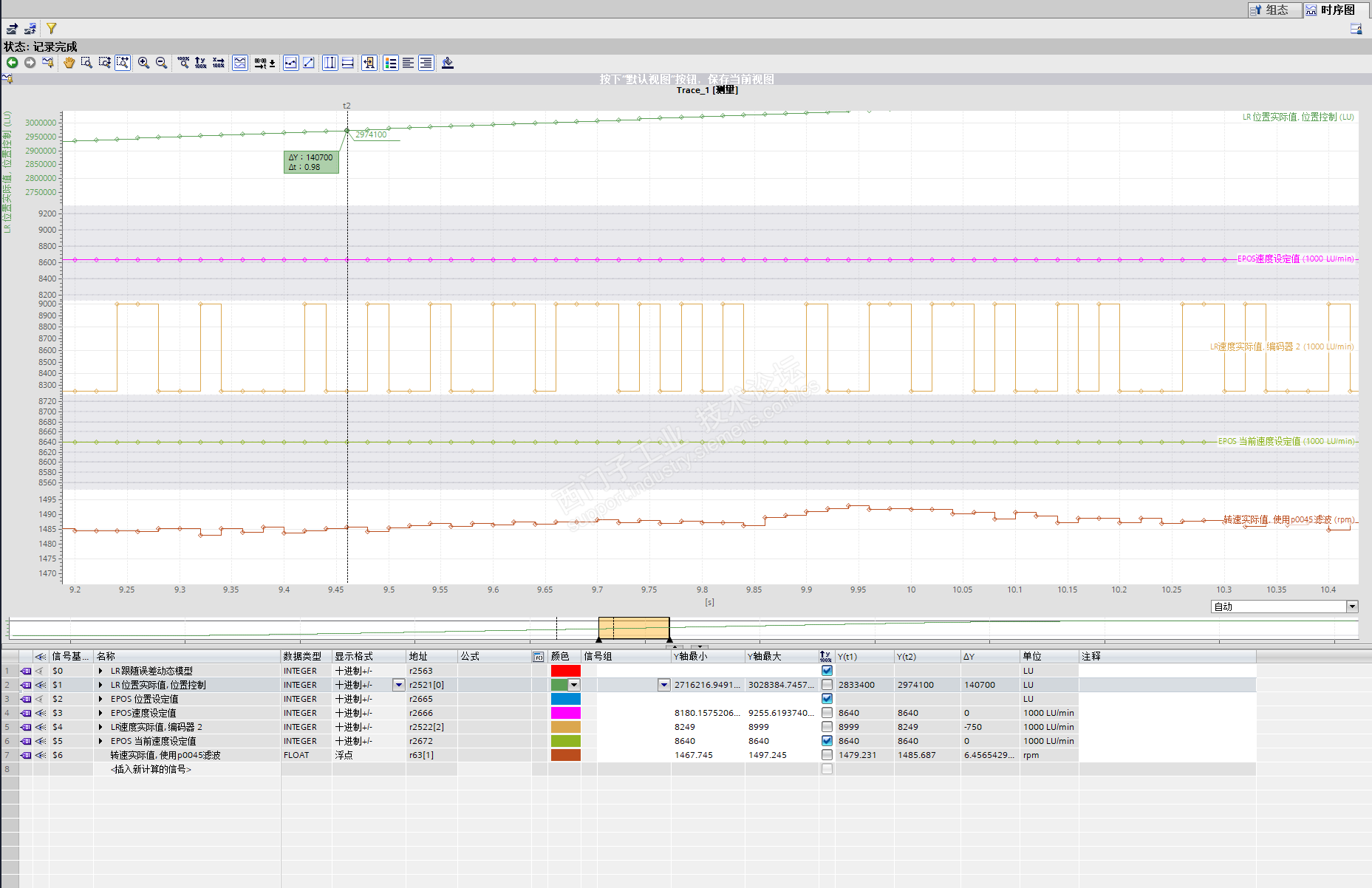
通过Trace实际位置曲线,并未出现位置反馈突变的情况,位置控制方向正确,加速度较小,运行过程中电机旋转、行走轮旋转正常。所以排除了原因1-5。
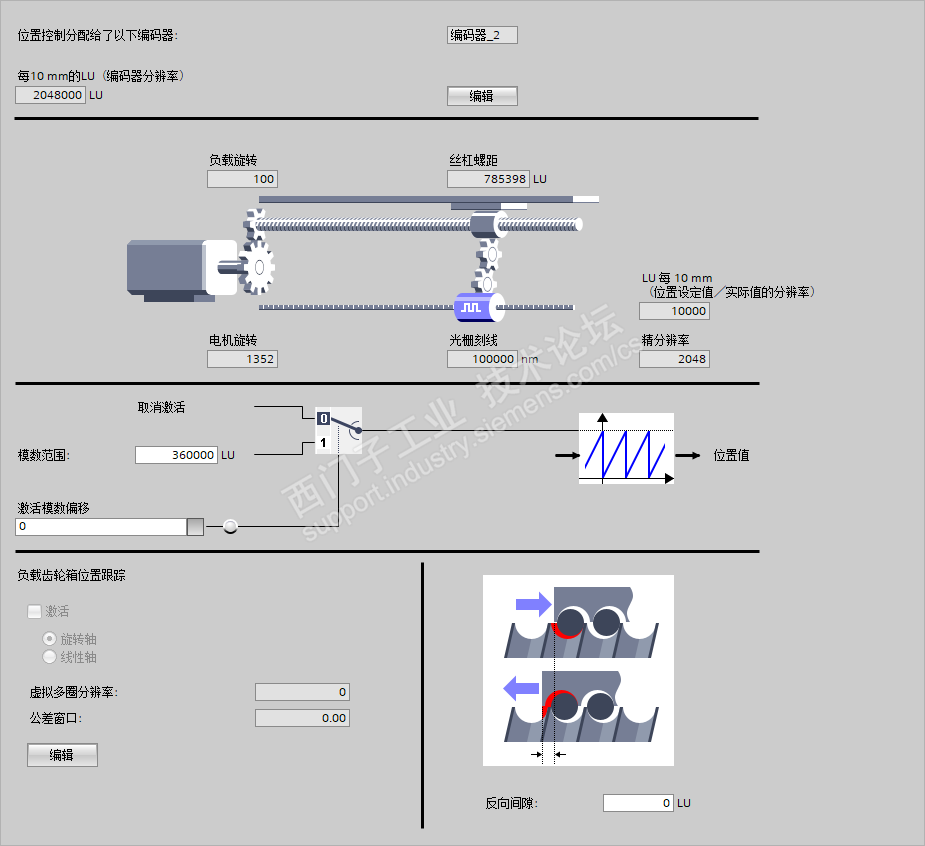
因设置的每10,mm 的LU 为 10000 (P2503=10000)所以得出 1mm/s = 60 1000LU/min。通过机械参数计算得出RGV速度约为1400mm/s。 对应 84,000 1000LU/MIN 。可知 84000 1000LU/MIN 对应电机转速 1456rpm。
机械装置中的丝杠螺距为直径*π*1000=250*π*1000≈785398LU
测试过程中,以最大转速依次
递减,发现 80000 1000LU/MIN 与30000 1000LU/MIN 速度并无明显差异,目测应该存在较大差异,结合原因6,开始怀疑给定速度有问题。
通过TraceLR实际速度反馈(R2552)和实际转速反馈(r63),在给定速度8460 1000LU/MIN 时,电机转速就已经达到了最大转速。然而P2571是84000 对应最大转速,正好相差10 倍。
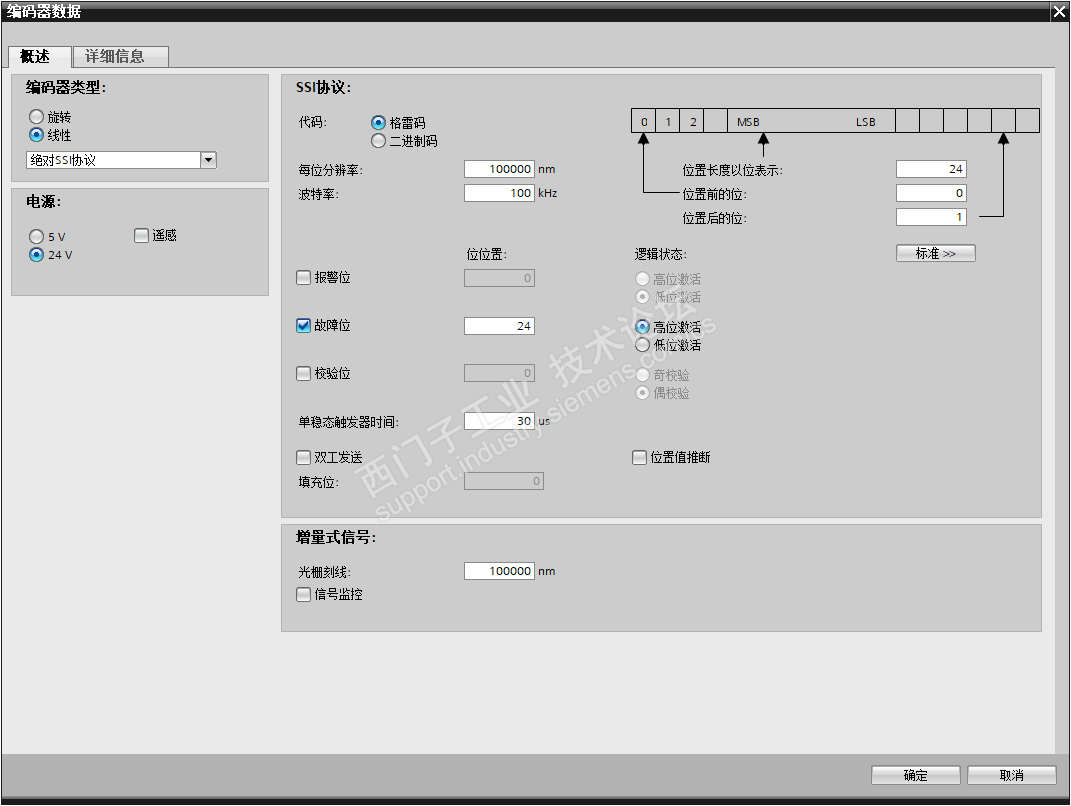
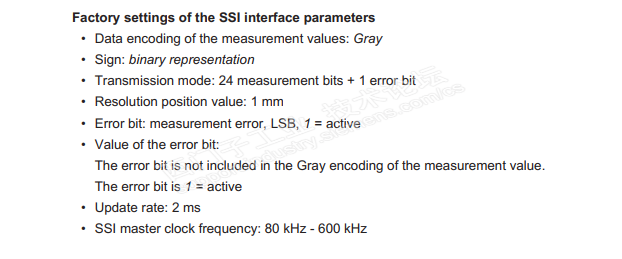
检查位置编码器配置,通过劳易测BPS307i手册,SSI接口数据为24数据位+1个错误位,
至此不知下一步该如何排查
配置在下图











 技术支持
技术支持 AI小西
AI小西
 风驰卡
风驰卡 产品入门
产品入门 在线产品选型
在线产品选型 售后登记和质保查询
售后登记和质保查询

 备件商城
备件商城 ASP工程师验证
ASP工程师验证 ASP公司证书验证
ASP公司证书验证 售后服务常见问题
售后服务常见问题 首页
首页 售前文档(样本、宣传册等)
售前文档(样本、宣传册等)  售后文档(FAQ、手册等)
售后文档(FAQ、手册等)
 首页
首页 立即开通1847会员
立即开通1847会员 标准机型应用中心
标准机型应用中心
 首页
首页 教室培训课
教室培训课 取证训练营
取证训练营 在线自学课
在线自学课 认证证书查询
认证证书查询 培训伙伴验证
培训伙伴验证 首页
首页 最新发帖
最新发帖 精华帖
精华帖 发新帖
发新帖 已解决问题
已解决问题 精华常见问题
精华常见问题 官方商城
官方商城 西门子中国
西门子中国

 普通
普通


 本版热门话题
本版热门话题

 相关推荐
相关推荐 相关帖子推荐
相关帖子推荐












