一台以CU310-2PN为控制的伺服系统。电机额定功率是55kW,额定转速980rpm,电机轴系是一个200kg当量质量的转鼓,CU310-2PN采用伺服模式驱动。最高转速为1500rpm。
伺服模式驱动,其优化和辨识的参数是两个。
P1910 = 1
P1960 = 1
优化辨识后,其PI参数和编码器输入滤波参数分别为:
P1460 = 136
P1462 = 13.0 ms
P1441 = 小于1ms
然后,做一个录波看看调试效果。因为是大惯性负载,所以该系统设置了15s的加减速斜坡时间,以及3s的起始终止圆弧。其录波波形如下示:
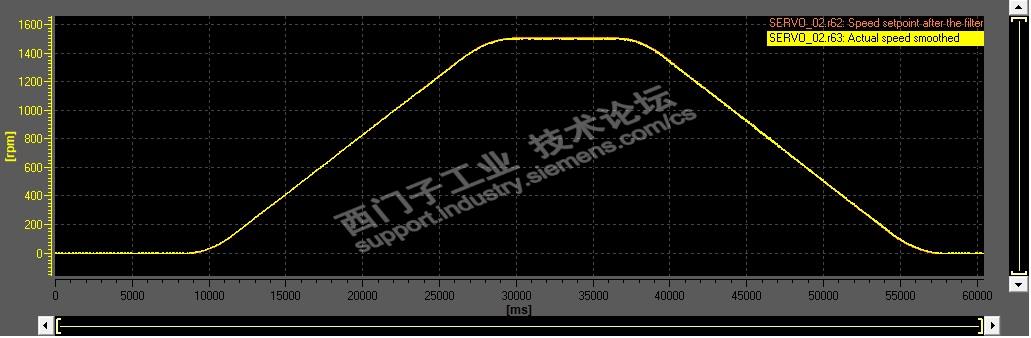
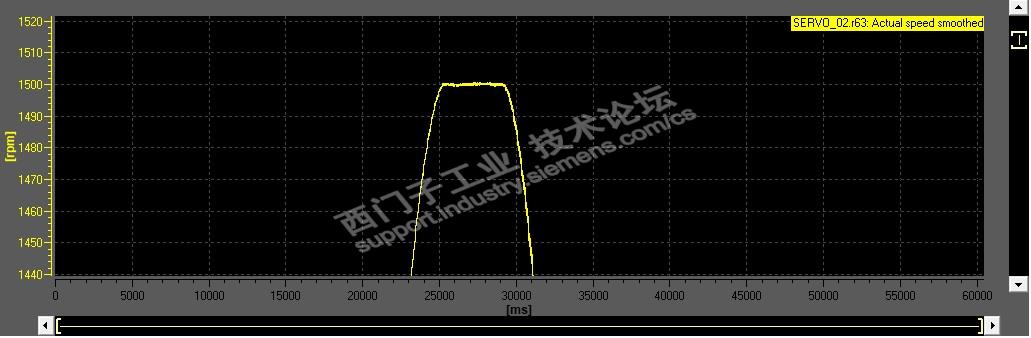
这波形效果还可以嘛。有毛病吗?但是,再仔细看看,把稳态波形的坐标系减小范围,放大波形看看呢?

这是不是不好呢?起码不是很理想的那种。为什么?因为编码器信号输入的滤波时间P1441的值太小了,还不足1ms,这对于大惯性系统而言,有必要追求这样的瞬态指标吗?而且放大倍数P1460 = 136倍,积分时间P1462 = 13ms,也太邪乎了。
将
P1460 = 13.6;放大倍数缩小10倍
P1462 = 130ms,积分时间放大10倍
P1441 = 20ms,滤波时间放大20倍以上
再录波看看:
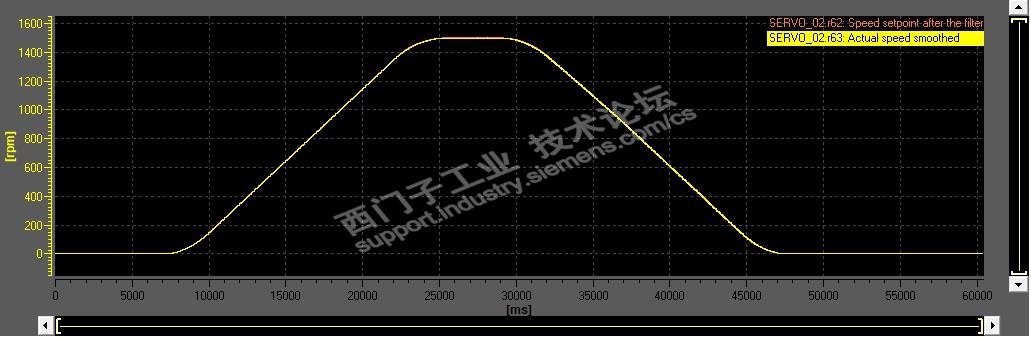
波形基本满意。再去现场主机看看震动状态,也没有问题。于是收拾家伙撤了。










 技术支持
技术支持 AI小西
AI小西
 风驰卡
风驰卡 产品入门
产品入门 在线产品选型
在线产品选型 售后登记和质保查询
售后登记和质保查询

 备件商城
备件商城 ASP工程师验证
ASP工程师验证 ASP公司证书验证
ASP公司证书验证 售后服务常见问题
售后服务常见问题 首页
首页 售前文档(样本、宣传册等)
售前文档(样本、宣传册等)  售后文档(FAQ、手册等)
售后文档(FAQ、手册等)
 首页
首页 立即开通1847会员
立即开通1847会员 首页
首页 教室培训课
教室培训课 取证训练营
取证训练营 在线自学课
在线自学课 认证证书查询
认证证书查询 培训伙伴验证
培训伙伴验证 首页
首页 最新发帖
最新发帖 精华帖
精华帖 发新帖
发新帖 已解决问题
已解决问题 精华常见问题
精华常见问题 运维工程师专区
运维工程师专区 官方商城
官方商城 西门子中国
西门子中国

 钻石
钻石


 本版热门话题
本版热门话题

 相关推荐
相关推荐 相关帖子推荐
相关帖子推荐










