









 技术支持
技术支持 AI小西
AI小西
 风驰卡
风驰卡 产品入门
产品入门 在线产品选型
在线产品选型 售后登记和质保查询
售后登记和质保查询

 备件商城
备件商城 ASP工程师验证
ASP工程师验证 ASP公司证书验证
ASP公司证书验证 售后服务常见问题
售后服务常见问题 首页
首页 售前文档(样本、宣传册等)
售前文档(样本、宣传册等)  售后文档(FAQ、手册等)
售后文档(FAQ、手册等)
 首页
首页 立即开通1847会员
立即开通1847会员 标准机型应用中心
标准机型应用中心
 首页
首页 教室培训课
教室培训课 取证训练营
取证训练营 在线自学课
在线自学课 认证证书查询
认证证书查询 培训伙伴验证
培训伙伴验证 首页
首页 最新发帖
最新发帖 精华帖
精华帖 发新帖
发新帖 已解决问题
已解决问题 精华常见问题
精华常见问题 官方商城
官方商城 西门子中国
西门子中国

 钻石
钻石


 本版热门话题
本版热门话题

 相关推荐
相关推荐 相关帖子推荐
相关帖子推荐
恭喜,你发布的帖子

发布于 2025-11-03 16:06:27
1楼
最近两年,由于市场需求,我们用了不少的S120伺服控制模式。不论是CU310-2PN还是CU320-2PN的伺服模式,其优化辨识后基本都需要根据负载状态,去手动修改一下参数。通过录波确认调试效果。通过几台伺服模式设备的调试,发现了其规律性。而且调试现在也很顺手了。
下图示:

由图示,一图在手,所有的调试相关参数尽收眼底。顶楼的系统最终参数设置尽在于此。惯性比和负载惯性都是系统在优化过程自动计算的。理论计算的轴系当量质量200kg,这里实际测的是190kg以上(轴系有效旋转半径是0.26526m)。接近理论计算。我们通过电机输出扭矩传感器最后实测的转鼓惯量是201kg。更接近理论设定值了。
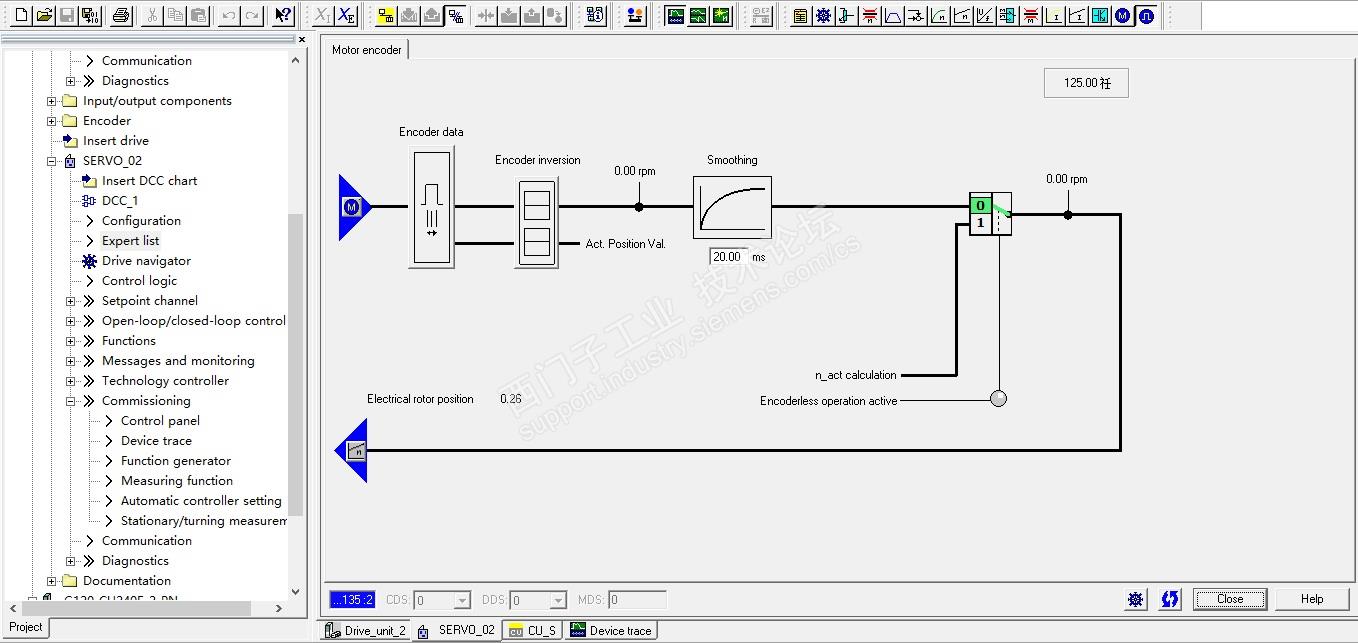
这个编码器信号滤波参数,最好是在动态优化辨识以前设置。尽量不要由装置自己计算。
总之,一回生二回熟,西家传动装置调试的越多,总结的信息也越多。装置调试就越玩转于鼓掌之间。
分享本文目的,意在说明自己的观点。专业技术应用,既有面上广阔空间,也有内部自身探索无尽领域。所以,从事应用技术,总是有一句话,叫没有最好,只有更好。所以不管是自动化的PLC还是传动技术都没有天花板。
我们的目标:传动技术应用要追求卓越,力臻完美。(哈哈)
请填写推广理由:

分享
只看
楼主










