引子
近来遇到现场一个实际问题,就是我在30kW以下的交流电机+MM440的控制里,因为系统转动惯量很小,在辨识中,调节器PI时间常数计算和设置的也很小。我看了一下,采用P1910=1所计算的系统启动时间都在0.5秒以内(参数r0345)(注:启动时间,西门子的手册定义它的含义是以额定负载从0加速到电机额定转速所需要的时间)。由此速度调节器的PI参数设置的就非常的“硬”。而我现场的负载是通用汽油机的性能试验台,通机一般都是单缸机,工作周期负载的冲击很大,因为电机与通机之间连接器有间隙存在,很容易因为这种负载的冲击而造成断裂和损坏。这样的事情发生比较频繁了。
由此关注系统的控制特性能不能在这种负载冲击中搞得缓冲一些,柔性控制呢?在直流系统里,西门子的装置有一个变速箱间隙缓冲控制功能,那么交流系统是不是也有类似的功能呢?或者说应该有什么对策呢?
由此,我向400-810-4288求助,给Y版和兵版打过咨询电话,也把注意力集中在了MM440的手册和功能图的研读上了。通过大家的指点和自己的试验。现在这个问题应该说是搞定了。很想共享下我的认识和体会。感兴趣的网友们可以参与讨论呦。
解决方案描述:
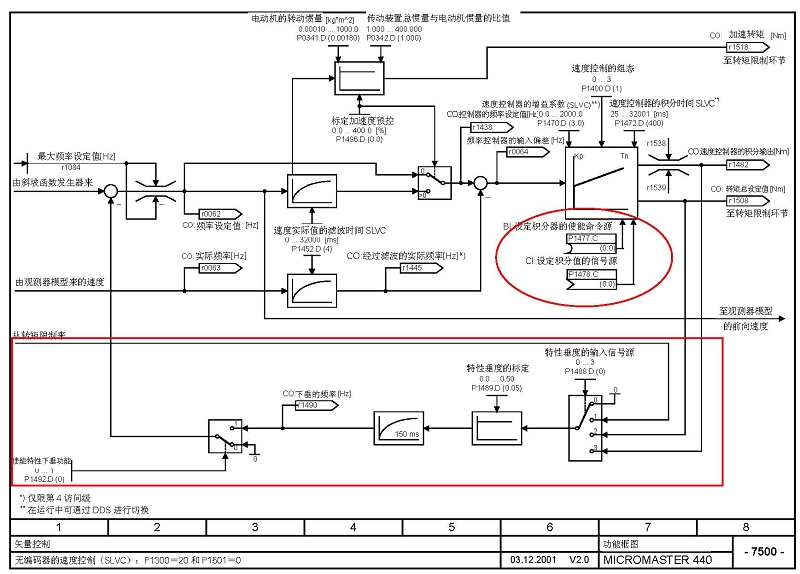
1.采用MM440中速度调节器的Droop功能。当转速给定或反馈发生变化的时候,属于负载变化的加减速动态过程,此时激活调节器下垂特性,无疑是一种缓冲功能。嗯,很好,是一招。这是西门子技术支持给我的提示。可是问题来了,Droop功能一旦激活,这种下垂特性不能消失,转速的变化回不到给定点,这是试验要求不允许的。发动机的性能试验,对转速的变化是有严格要求的,动态的负载变化造成转速下垂允许,但必须要恢复到原设定值,否则需要人为去调整,这对实验人员很不方便。能不能实现动态过程Droop有效,稳态时Droop禁止呢?按照现在给出的Droop功能选择,是不行的,参数P1488的三种选择性质都差不多,都不能在稳态消除下垂特性的作用。但是,通过实验,针对参数P1477和P1478的设置,即可满足要求。P1477=52:8(设定值/实际值偏差过大);P1478=0。这样,当调节器的设定值和实际值出现偏差过大时,参数P1477=0,参数r1482按照积分分量输出对下垂特性起作用,当给定值和实际值没有偏差时,P1477=1,P1478=r1482=0。实现了稳态时下垂特性失效。感觉很爽的。^_^
2.通过设置参数P342的惯性比,让系统的启动时间r0345为一个假想的合理时间,也就是延长他的启动时间。比如让r0345=4或者5,以此,计算转速调节器的PI参数,并手动键入P1472/P1470(注:P1300=20),这实际是把调节器的参数变软,也可实现对冲击负载的缓冲。这招儿是Y版指点的。在此非常感谢。我试了一下,效果很不错。系统的负载特性棉里带刚。^_^,有点打太极拳的味道。
下面给出相关的功能图参考:










 技术支持
技术支持 AI小西
AI小西
 风驰卡
风驰卡 产品入门
产品入门 在线产品选型
在线产品选型 售后登记和质保查询
售后登记和质保查询

 备件商城
备件商城 ASP工程师验证
ASP工程师验证 ASP公司证书验证
ASP公司证书验证 售后服务常见问题
售后服务常见问题 首页
首页 售前文档(样本、宣传册等)
售前文档(样本、宣传册等)  售后文档(FAQ、手册等)
售后文档(FAQ、手册等)
 首页
首页 立即开通1847会员
立即开通1847会员 标准机型应用中心
标准机型应用中心
 首页
首页 教室培训课
教室培训课 取证训练营
取证训练营 在线自学课
在线自学课 认证证书查询
认证证书查询 培训伙伴验证
培训伙伴验证 首页
首页 最新发帖
最新发帖 精华帖
精华帖 发新帖
发新帖 已解决问题
已解决问题 精华常见问题
精华常见问题 官方商城
官方商城 西门子中国
西门子中国


 钻石
钻石




 本版热门话题
本版热门话题

 相关推荐
相关推荐 相关帖子推荐
相关帖子推荐











