3. 具有定速牵引的收线装置的控制
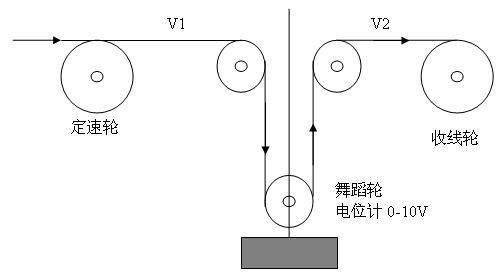
由上图可以得知,线材张力由舞蹈轮的自重决定,是恒定的;牵引轮出线速度V1是恒定的;收线轮随着卷径的增大,V2有增大的趋势,舞蹈轮会被提起;当通过闭环控制使舞蹈轮在垂直方向的位置不变时,V1=V2,从而实现恒张力恒线速卷取
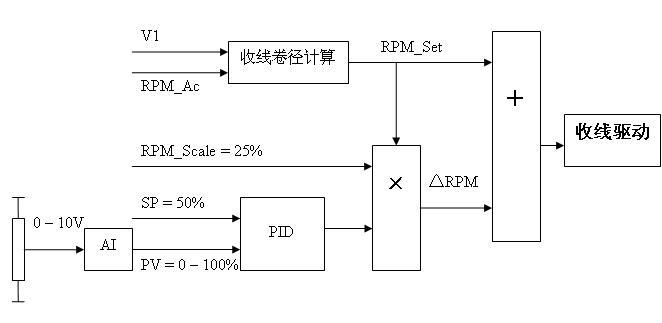
这是一个典型的前馈+PID微调的应用,建议采用FB41做微调闭环运算,OB35中直接调用,中断周期 5- 20 ms。不建议采用FB41的DISV做前馈通道,这里的前馈是主通道,而PID是辅助通道,这样程序的灵活性会有所限制。
FB41参数
COM_RST
CYCLE = 10ms
MAN_ON = FALSE 可以利用手动功能暂时禁止PID微调功能
MAN = 0.0
PVPER_ON = TRUE
PV_PER = PIW 256 舞蹈轮电位计 0-10V 反馈,直接输入,采用硬件滤波,滤波作用要尽量小
SP_INT = 50% 取舞蹈轮电位计的中间位置值
LMN_HLM = 100.0
LMN_LLM = -100.0
LMN 系统稳定时,卷径计算合理,LMN的输出应该趋于0
点击此处查看附件点击此处查看附件管理员注:本帖已被纳入此次探讨发帖整理,请
点此详阅。



















 西门子商城
西门子商城 西门子中国
西门子中国

 普通
普通

 本版热门话题
本版热门话题

 相关推荐
相关推荐 相关帖子推荐
相关帖子推荐












