quote:以下是引用jacky_andy在2011-05-11 09:03:25的发言:
关于插补的概念:
在运动控制器(比如TCPU或者SMOITON)的运算过程中,
位置设定值是通过目标位置的值就可以得到实际的命令位置的曲线。
首先采用加速度,描绘出速度曲线(V=at),再通过速度曲线来(S=0.5at2)
设定的曲线和实际的位置曲线的差值就是跟随误差。
跟随误差通过pid运算就得到了实际的输出值。
插补的作用主要是使实际的运动过程更加符合设定的位置轮廓。
插补的参数是不是跟加减速和jerk等参数有关?还是跟别的有关?
不知道我的理解对不对,请指教
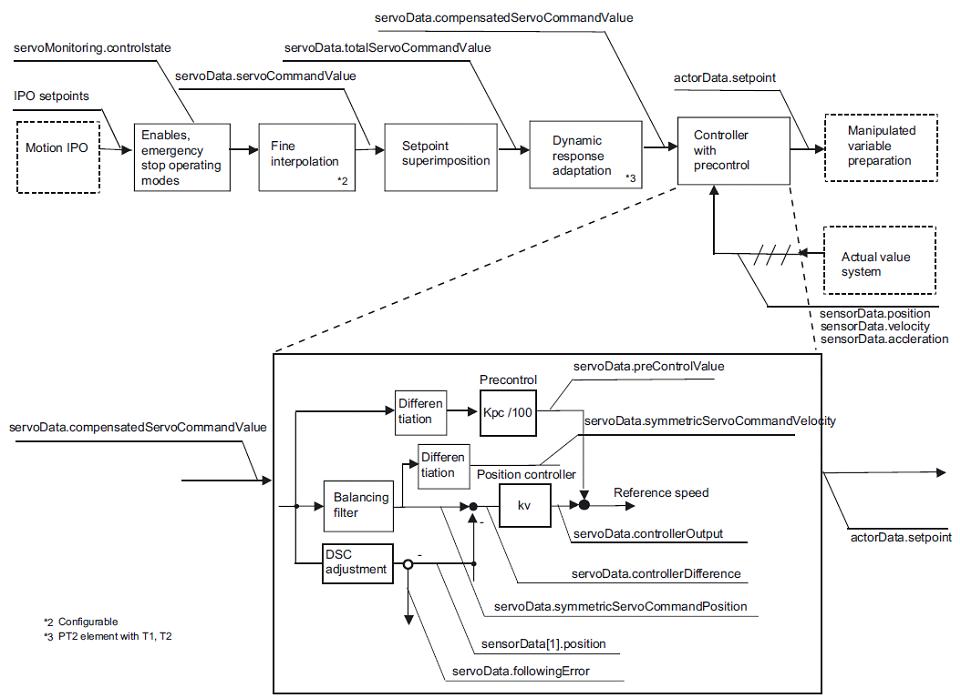
SIMOTION中,位置设定值由插补器Interpolator产生。单轴定位运动时,插补器会根据目标位置、加速度、加加速度等,产生实际位置设定曲线。速度轮廓有“梯形trapezoidal”和“平滑Smooth”两种。有了这些数据,就确定了一条唯一的速度轮廓,同时也得到了位置曲线。插补器的运行周期即IPO周期,它是SERVO周期的整数倍。
插补器的输出并不是直接作用于驱动器上,中间还有精插补、叠加运动、动态响应自适应、平衡滤波等环节。看一下这个结构图,能更明了一些。
 点击此处查看附件
点击此处查看附件















 官方商城-正品备件
官方商城-正品备件
 DIOMIS
DIOMIS 西门子中国
西门子中国

 普通
普通

 本版热门话题
本版热门话题

 相关推荐
相关推荐 相关帖子推荐
相关帖子推荐












