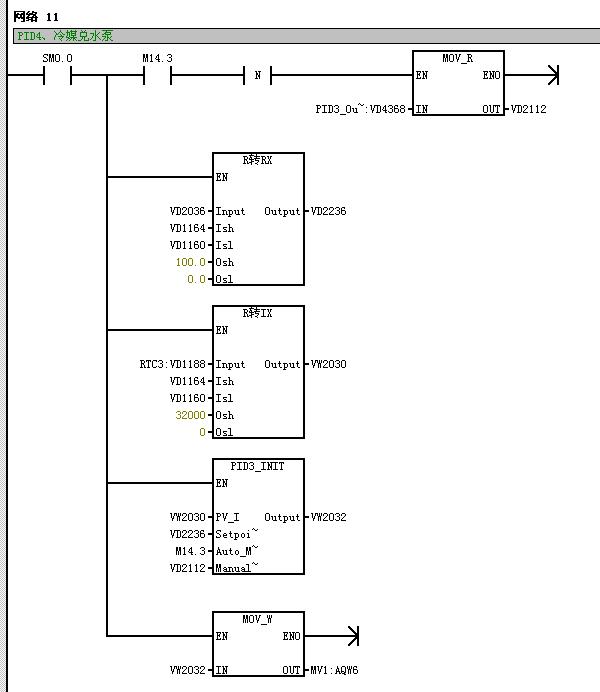
quote:以下是引用凌飞翼在2011-02-26 20:32:20的发言:关于这个问题,我推荐一个我常用的做法:将输入设0-32000,范围低限设为0,范围高限设为100(这里理解为0-100%),对应调节范围的最低Rl、最高限Rh。
PV输入值用反馈工程量(一般是误差处理之后的实数),通过R转I得到,Rl、Rh作为转换的实数上下限,0-32000作为整数上下限。
SP输入值也用转换,R转R,输入IRl=Rl、IRh=Rh,输出ORl=0、ORh=100.这样,我们人机界面的设定值依然是工程量。
当然程序上因为多了两次转换,代码长了些。可是每个PID回路的参数均相同(对于差异大的回路不同点也就只是采样时间了),编程耗时更短,差错率更低。
还有一个更加诱人的地方就是:我们可以把Rh-Rl的间隔尽可能缩短,提高PV相对于工程量的分辨率,让PID调节更加精确。
我的PID典型而完整的网络如下:
这是从《来自西门子技术支持热线的故事:PID向导中的量程设定》中搬过来的。怕你找不到O(∩_∩)O哈哈~










 技术支持
技术支持 AI小西
AI小西
 风驰卡
风驰卡 产品入门
产品入门 在线产品选型
在线产品选型 售后登记和质保查询
售后登记和质保查询

 备件商城
备件商城 ASP工程师验证
ASP工程师验证 ASP公司证书验证
ASP公司证书验证 售后服务常见问题
售后服务常见问题 首页
首页 售前文档(样本、宣传册等)
售前文档(样本、宣传册等)  售后文档(FAQ、手册等)
售后文档(FAQ、手册等)
 首页
首页 立即开通1847会员
立即开通1847会员 标准机型应用中心
标准机型应用中心
 首页
首页 教室培训课
教室培训课 取证训练营
取证训练营 在线自学课
在线自学课 认证证书查询
认证证书查询 培训伙伴验证
培训伙伴验证 首页
首页 最新发帖
最新发帖 精华帖
精华帖 发新帖
发新帖 已解决问题
已解决问题 精华常见问题
精华常见问题 官方商城
官方商城 西门子中国
西门子中国

 普通
普通

 本版热门话题
本版热门话题

 相关推荐
相关推荐 相关帖子推荐
相关帖子推荐












