| 作者 | 主题 |
|---|---|
|
龙晨旭日 侠圣 
经验值:2096 发帖数:346 精华帖:2 |
楼主
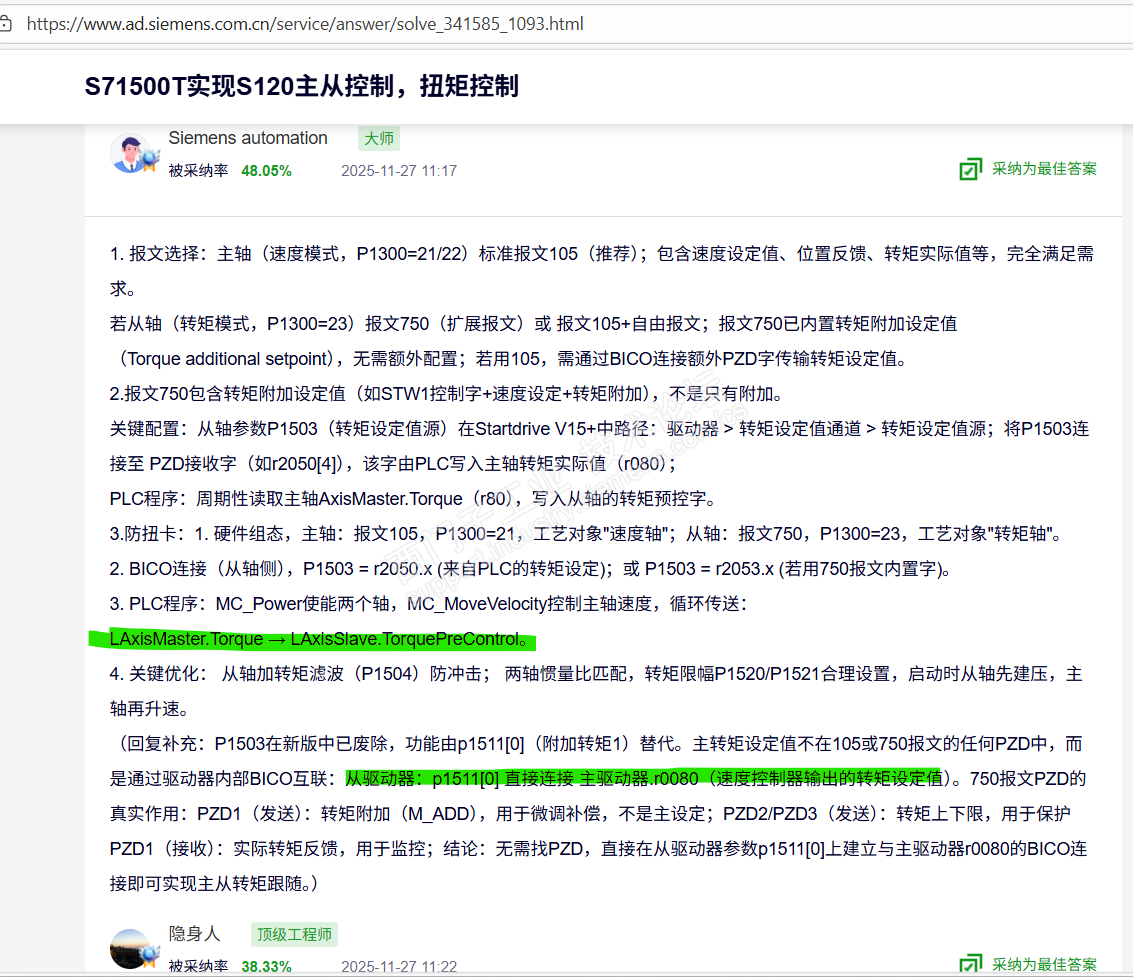
主题:S7 1500T实现S120两台伺服同步回零,同步控制,力矩同步,类龙门方案 前面问了两个个问题,S71500T实现S120主从控制,扭矩控制 https://www.ad.siemens.com.cn/service/answer/solve_341585_1093.html S7 1500T实现S120两台伺服同步回零,同步控制,力矩同步,类龙门方案 https://www.ad.siemens.com.cn/service/answer/solve_341643_1084.html 各位做个参考
问的问题不是很全面,不能再补充说明,参考前面的问题,再次提问,找答案提问限制较多,来论坛。
硬件: 1:S7 1500T: 2:CU320-2PN 3: 两台S120驱动器,两台1FK7伺服电机 4:1个原点传感器,2个正负极限传感器,共3个
工艺要求,应用说明: 1:两台S120伺服电机1FK7,使用S71500T控制。 2:两台电机A和B,使用刚性连接(同轴硬连),推动同一负载,实现同步控制,两电机各承担总负载的50%,例:负债瞬时达到100NM,每个电机输出扭矩50NM,两电机扭矩输出不要差距大。当受力面受力不均匀时,能保证两边不扭曲,卡顿,有点类似龙门结构,但受力是一个面,不像龙门是一个点。类似图AB.
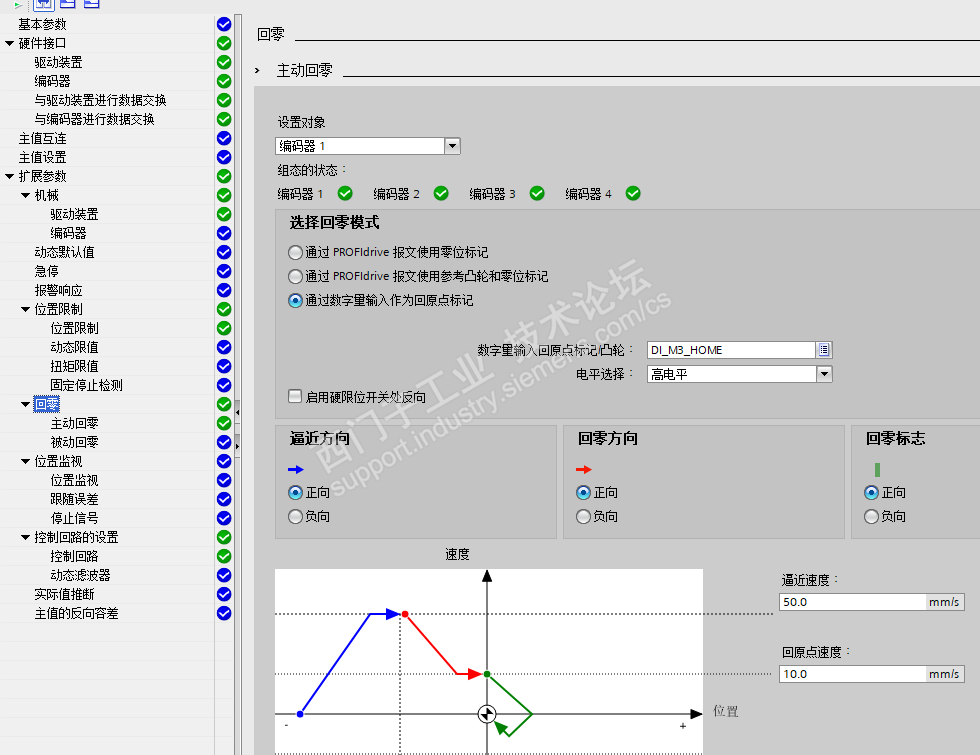
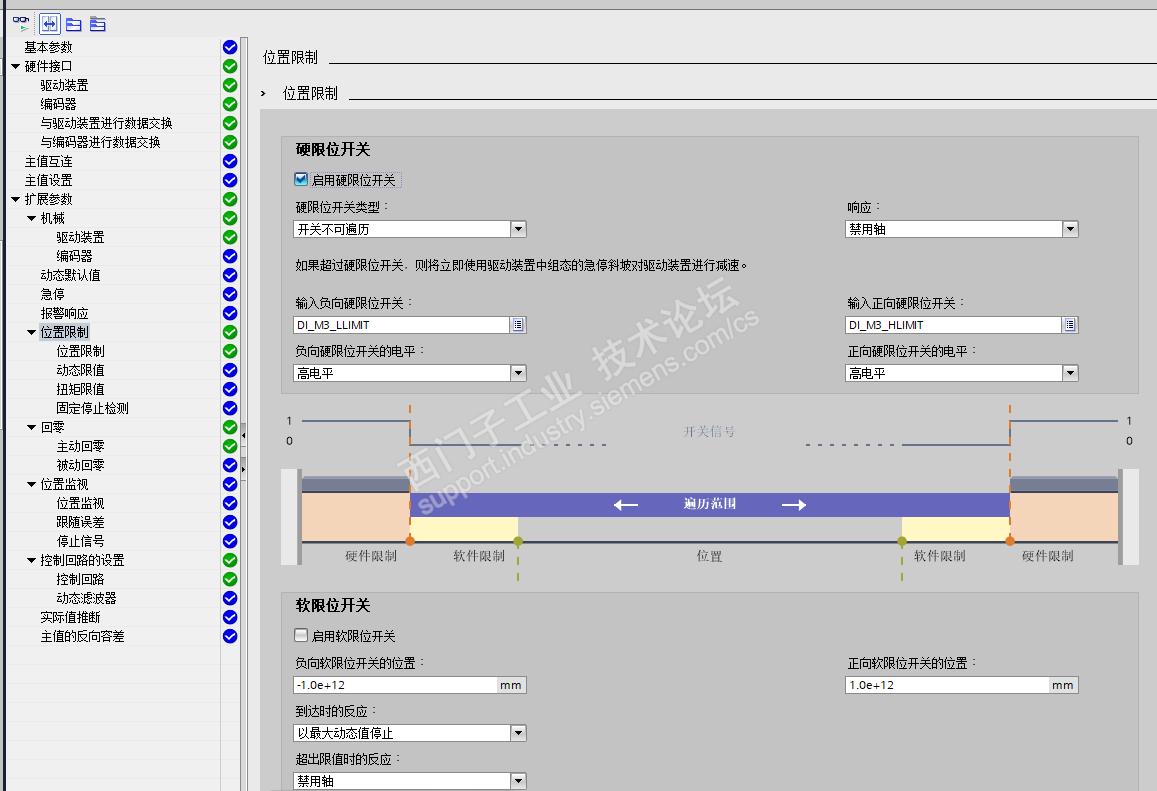
3:这个刚性连接(同轴硬连),包含A和B电机,组成的整体结构上只有有一个原点传感器,正负限位各一个极限传感器,共3个传感器。TIA V20TO配置中将3个传感器接关联到电机A上,根据外部传感器实现主动回零,遇到极限传感器停止。如图<传感器回零>,图<正负极限位传感器>
控制方案与测试结果: 1: 两电机均使用报文105+750报文,TIA V20中建立两同步工艺对象TO 2:使用同步控制MC_GearIn已实现两轴的同步,速度与位置同步,扭矩是否同步没检测。 电机A作为主轴,电机B作为从轴。
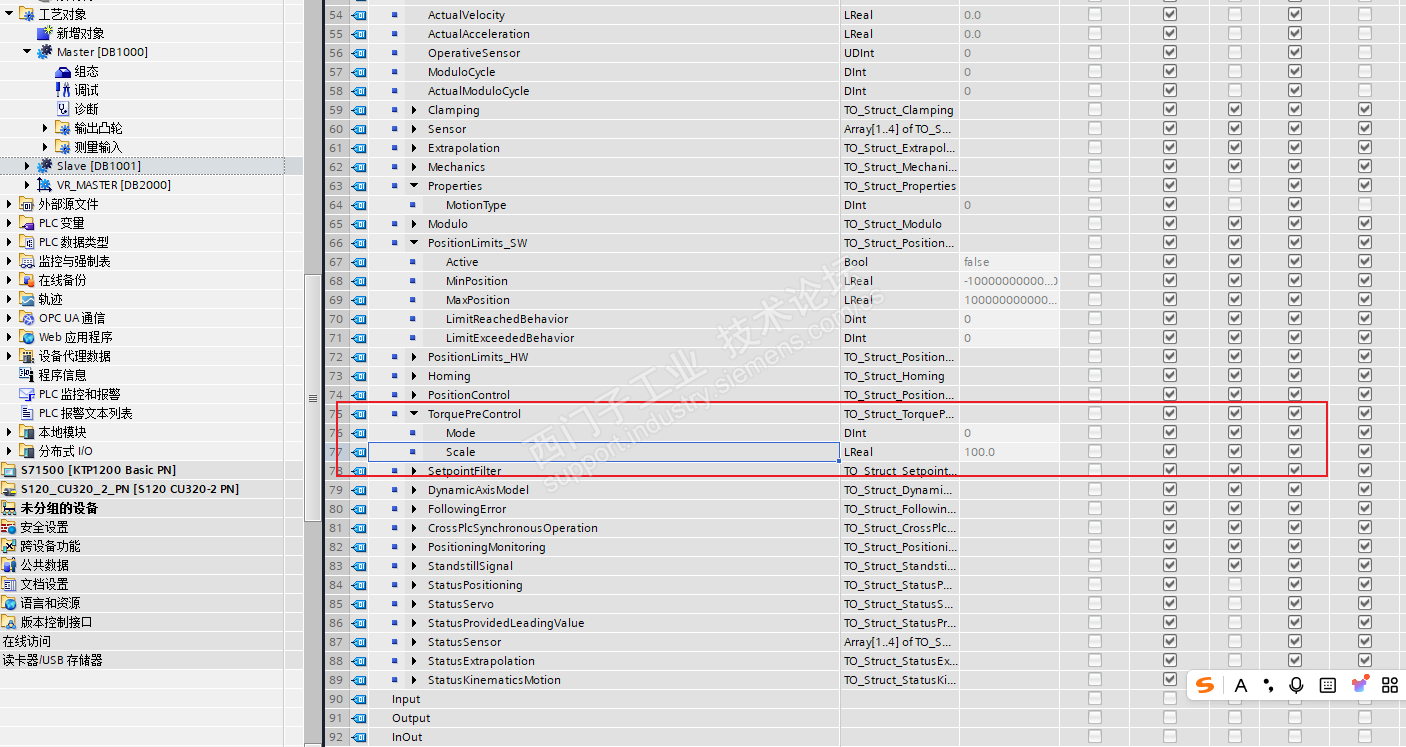
出现的问题: 1:如果遇到一边的电机B受力比另一侧电机A有明显增大时,就会报警,所以需要实现在出现这种受力不均匀时,两边力矩能自动补偿调节,不要一个电机出力,另一个电机电机不出力或出力差距大。两电机只要不超过设定的力矩限制就不要报警,停在那里保持力矩输出也可以,除非两电机位置偏差过大报警。 2:回零结束时报警。从轴使用了MC_GearIn同步,其中主轴A启动回零后,从轴B会跟随主轴A运动,但是由于到达零点传感器后,有一个反向动作,并且主轴A回零结束时主轴实际位置值会变为0,从轴B由于在同步中,会突然接受到一个突变的主轴A位置,从轴B就会报同步误差过大停机。 3:上个回答中 “循环传送:LAxisMaster.Torque → LAxisSlave.TorquePreControl”, 是没有LAxisMaster.Torque的,并且按回复P1511已经连接了主轴的R79/R80,这里是不是重复连接了。
总结需求: 我现在这种方案哪里有问题?如何解决以上工艺要求,第一次使用这种控制方案,不是很懂, 也可以推翻以上方案。
如果要飞得高,就该把地平线忘掉!
|
|
无名的人 至圣 经验值:12385 发帖数:1138 精华帖:55 |
1楼
 主题:回复:S7 1500T实现S120两台伺服同步回零,同步控制,力矩同步,类龙门方案
主题:回复:S7 1500T实现S120两台伺服同步回零,同步控制,力矩同步,类龙门方案同步轴以位置环为主 从轴跟随主轴在加减速阶段扭矩有偏差是正常的 由于机械结构问题可能导致匀速阶段也会有扭矩偏差这也是正常的 至于你说的偏差大 你最好去找机械方面的问题 电气控制上不是很好解决 扭矩限幅做不好很容易跟随误差过大 要么你干脆换方案 从轴直接扭矩控制 反正刚性连接 不去考虑从轴位置即可 至于回零 我有个骚招 主轴回零时从轴去使能工艺对象 然后强制开抱闸让他跟着主轴走就行 主轴回完零再把位置信息写给从轴就是了 当然如果从轴扭矩控制那没这问题了 另外 一台CU320-2带两台伺服直接内部完成主从控制岂不美哉 干嘛要放PLC里面
烟锁池塘柳 桃燃锦江堤
|











 技术支持
技术支持 AI小西
AI小西
 风驰卡
风驰卡 产品入门
产品入门 在线产品选型
在线产品选型 售后登记和质保查询
售后登记和质保查询

 备件商城
备件商城 ASP工程师验证
ASP工程师验证 ASP公司证书验证
ASP公司证书验证 售后服务常见问题
售后服务常见问题 首页
首页 售前文档(样本、宣传册等)
售前文档(样本、宣传册等)  售后文档(FAQ、手册等)
售后文档(FAQ、手册等)
 首页
首页 立即开通1847会员
立即开通1847会员 首页
首页 教室培训课
教室培训课 取证训练营
取证训练营 在线自学课
在线自学课 认证证书查询
认证证书查询 培训伙伴验证
培训伙伴验证 首页
首页 最新发帖
最新发帖 精华帖
精华帖 发新帖
发新帖 已解决问题
已解决问题 精华常见问题
精华常见问题 运维工程师专区
运维工程师专区 官方商城
官方商城